卡尔曼滤波算法详解:图像处理中的核心工具
需积分: 9 115 浏览量
更新于2024-07-29
收藏 758KB PDF 举报
卡尔曼滤波算法是一种强大的数值处理方法,特别在图像处理领域中发挥着核心作用。该算法最初由SIGGRAPH2001课程的讲师Gary Bishop教授介绍,他在University of North Carolina at Chapel Hill的计算机科学系授课。该课程旨在为读者提供一个深入理解卡尔曼滤波器的基础,包括概率论、随机变量、状态空间模型以及滤波器的设计和应用。
课程内容涵盖了以下几个关键部分:
1. **简介**:课程首先描述了卡尔曼滤波的背景,强调其在估计和预测动态系统中的重要性,尤其是在处理如图像中的运动目标跟踪、信号处理等复杂问题时。
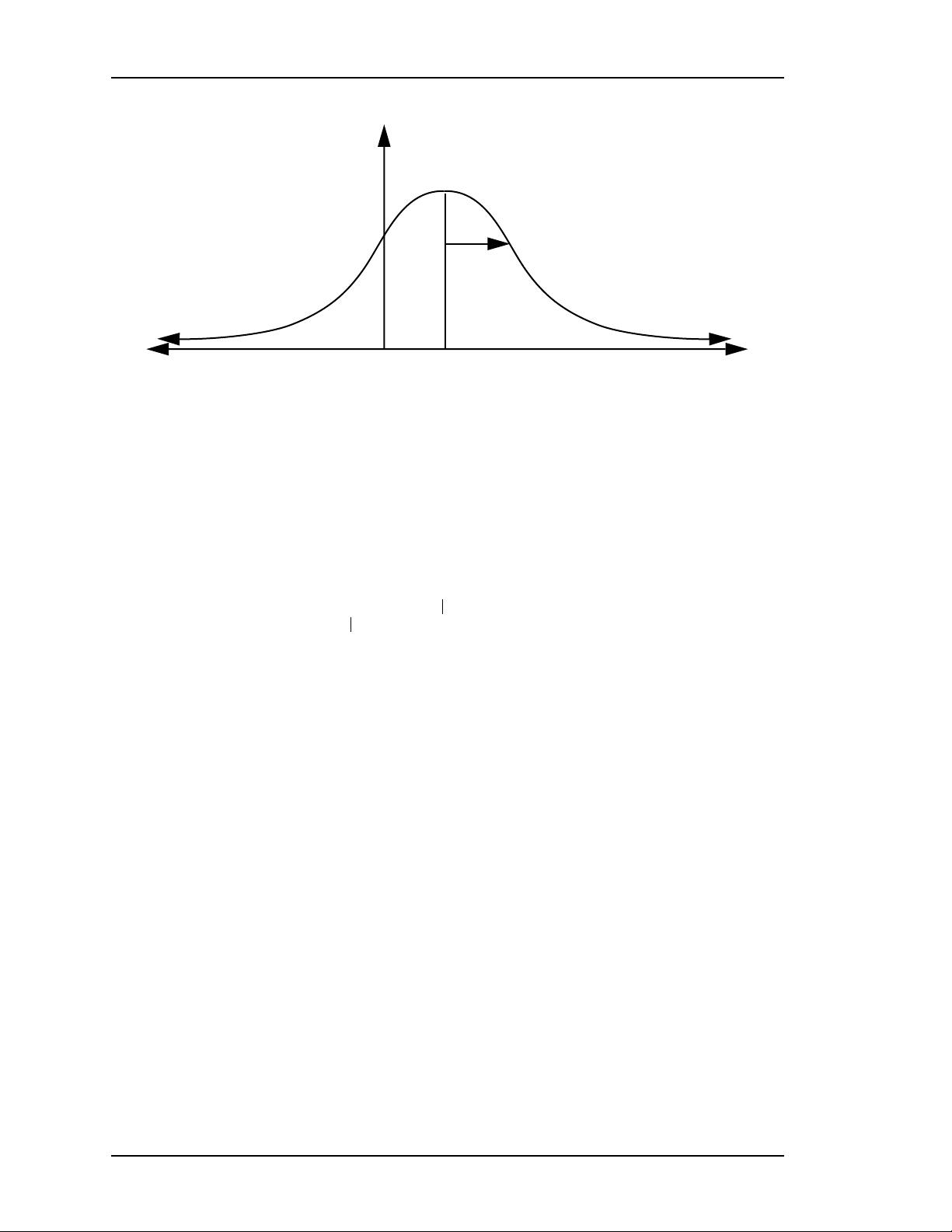
2. **概率和随机变量**:这部分介绍了概率的基本概念,如概率的定义、随机变量的性质以及它们如何用于描述不确定性。此外,还讨论了均值和方差的概念,这些都是估计过程中的关键参数。正常或高斯分布是常见的一种随机变量分布,对于卡尔曼滤波中的误差建模尤其有用。
3. **Stochastic Estimation**:滤波的核心在于建立和估计系统的状态,即通过观测数据推断未直接测量的变量。课程详细讲解了状态空间模型,这是一种将系统的动态行为与观测到的数据关联起来的数学框架。
4. **卡尔曼滤波器**:课程深入剖析了离散卡尔曼滤波器(Discrete Kalman Filter)的工作原理,以及如何利用它来更新和预测系统状态。随后,扩展卡尔曼滤波器(Extended Kalman Filter, EKF)被介绍,它允许处理非线性系统的问题,尽管不是精确的,但仍然是解决此类问题的有效方法。
5. **其他话题**:课程还涉及了滤波器的进一步扩展,如参数估计或调优,这对于优化滤波器性能至关重要。此外,课程探讨了多模态或多传感器融合(Multi-Modal/Multi-Sensor Fusion),在现实场景中,如无人机导航或机器人控制,多个信息源的集成可以提高滤波器的鲁棒性和精度。
卡尔曼滤波算法是数据融合和估计理论的重要组成部分,通过学习这个课程,读者能够掌握在图像处理等领域的实际应用技巧,并且对滤波器设计和优化有深入的理解。无论是初学者还是专业工程师,理解并掌握这种算法都对提升他们在信息技术行业的竞争力有着显著帮助。
SIGGRAPH 2001, Los Angeles, CA, August 12-17, 2001
12
Bayes’ Rule
In addition, Bayes’ rule follows from (2.3), offering a way to specify the probability
density of the random variable given (in the presence of) random variable . Bayes’
rule is given as
.
Continuous-Discrete
Given a discrete process and a continuous process , the discrete probability mass
function for conditioned on is given by
. (2.16)
Note that this formula provides a discrete probability based on the conditioning density,
without any integration. See (Kelly 1994) p. 546 for further explanation and proofs of the
above.
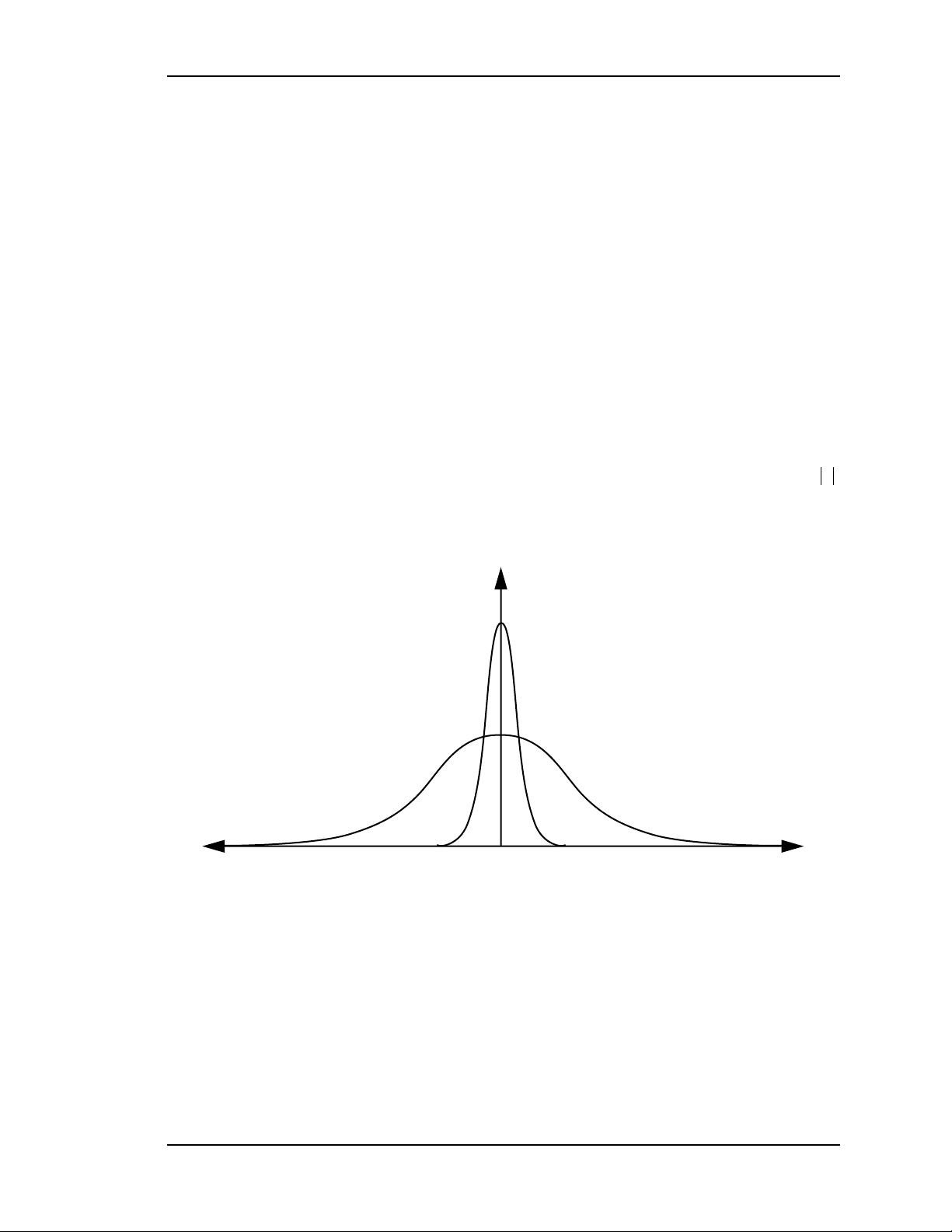
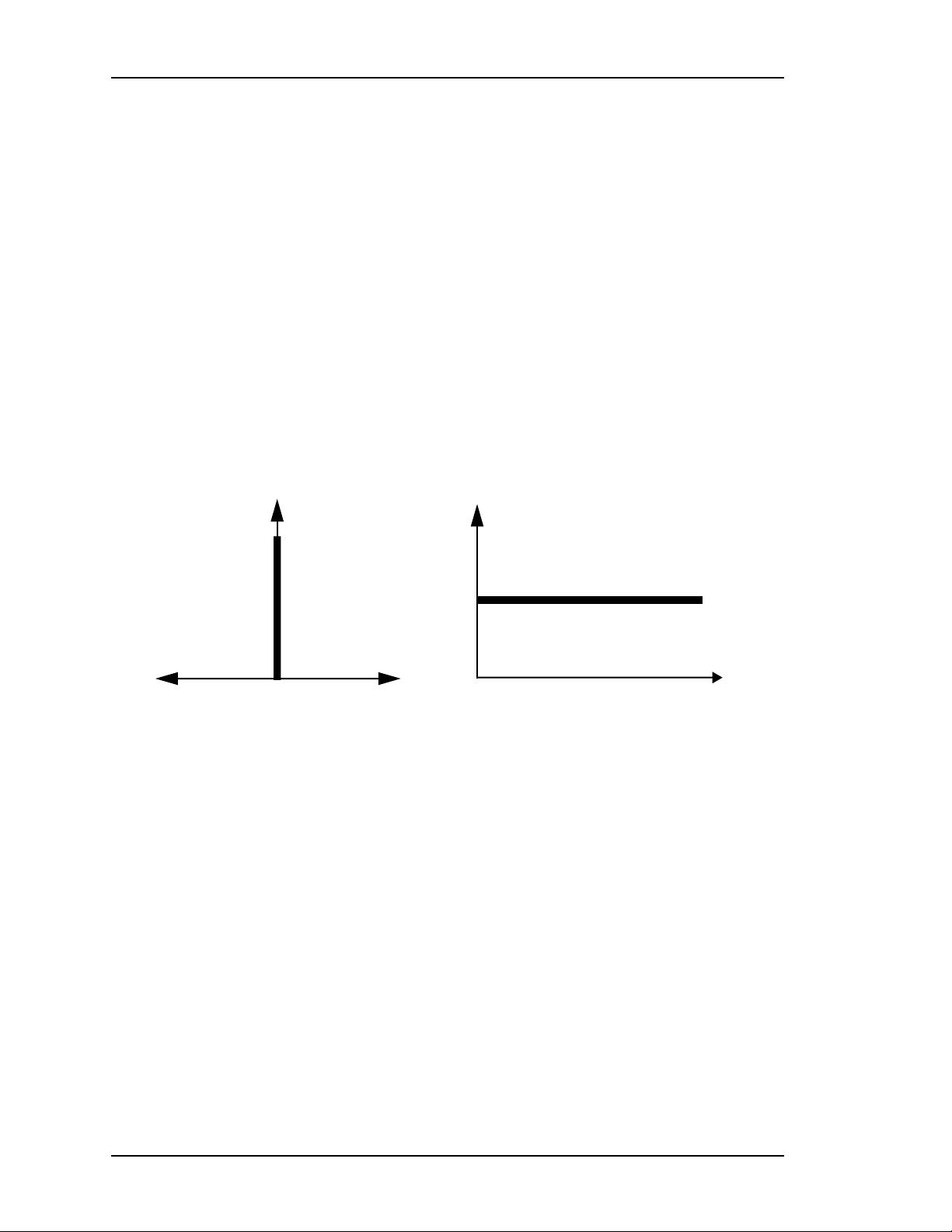
2.6 Spatial vs. Spectral Signal Characteristics
In the previous sections we looked only at the spatial characteristics of random signals. As
stated earlier, the magnitude of the variance of a signal can give us a sense of how much
jitter or “noise” is in the signal. However a signal’s variance says nothing about the
f
X
x()
σ
x ∞→x ∞–→
m
x
0
Figure 2.1: The Normal or Gaussian probability distribution function.
XY
f
XY
x()
f
YX
y()f
X
x()
f
Y
y()
-----------------------------------=
XY
XYy=
p
X
x | Yy=()
f
Y
y | Xx=()p
X
x()
f
Y
y | Xz=()p
X
z()
z
∑
-------------------------------------------------------=

剩余80页未读,继续阅读
238 浏览量
130 浏览量
189 浏览量
2023-09-27 上传
2024-05-10 上传
2023-03-23 上传
2023-08-01 上传
2023-07-04 上传
2024-05-20 上传

xiaopan727
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
