工业机械手设计与仿真:发展历程与关键技术
版权申诉
184 浏览量
更新于2024-06-21
收藏 774KB DOCX 举报
本文档探讨了搬运机械手的设计与仿真过程,着重于介绍机械手的基本概念、发展历程及其在工业生产中的重要作用。首先,机械手被定义为一种模仿人类手臂功能的自动装置,用于执行抓取、搬运和操作任务,尤其在工业生产环境中,它们被称为工业机械手。机械手技术融合了力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等多学科知识,体现了跨领域的综合优势。
1.1 预备知识
机械手的发展起始于20世纪50年代,最初主要采用示教再现和主从控制方式,随着技术进步,出现了能适应产品种类变化,拥有多个自由度的柔性自动化系统。美国是机械手研发的先驱,早期的机械手设计主要用于单一任务,专用性强,但随着工业技术的发展,通用机械手应运而生,能够根据不同的工作程序独立运行,适应性强,特别适合中小批量生产和快速产品转换的场景。
1.2 工业机械手的历史简述
从早期的简单构造到后来的复杂功能,工业机械手经历了显著的技术革新。它们最初是为了减轻工人在高温、高压、粉尘、噪声和有害环境下的劳动强度,提高生产效率。随着自动化程度的提升,机械手不仅用于基本的搬运和装配,还能进行精密焊接和操作,极大地推动了制造业的机械化和自动化进程。
在当今社会,工业机械手在汽车制造、电子装配、食品包装、制药等行业中广泛应用,对提高生产效率、降低成本和保证产品质量起到了关键作用。中国的机械手市场也在近年来迅速发展,表明其在国民经济中的地位越来越重要。
设计和仿真阶段对于机械手而言至关重要,它涉及到机械结构、材料选择、动力系统、控制系统、传感器集成等多个方面。通过精确的仿真,工程师可以优化机械手的动作性能、负载能力和精度,确保在实际应用中达到预期效果。此外,随着人工智能和物联网技术的进步,未来机械手将朝着更智能化、自适应的方向发展,进一步拓展其应用范围。
总结来说,搬运机械手的设计和仿真不仅是一项技术挑战,也是一门涵盖多学科知识的艺术。通过深入理解其原理、历史和发展趋势,我们可以预见机械手将在未来的工业生产中扮演更加重要的角色。

3 机械手手部的设计计算
3.1 手部设计基本要求
(1) 应具有适当的夹紧力和驱动力。应当考虑到在一定的夹紧力下,不同的传动机构所
需的驱动力大小是不同的。
(2) 手指应具有一定的张开范围,手指应该具有足够的开闭角度(手指从张开到闭合绕
支点所转过的角度)
D
g
,以便于抓取工件。
(3) 要求结构紧凑、重量轻、效率高,在保证本身刚度、强度的前提下,尽可能使结构
紧凑、重量轻,以利于减轻手臂的负载。
(4) 应保证手抓的夹持精度。
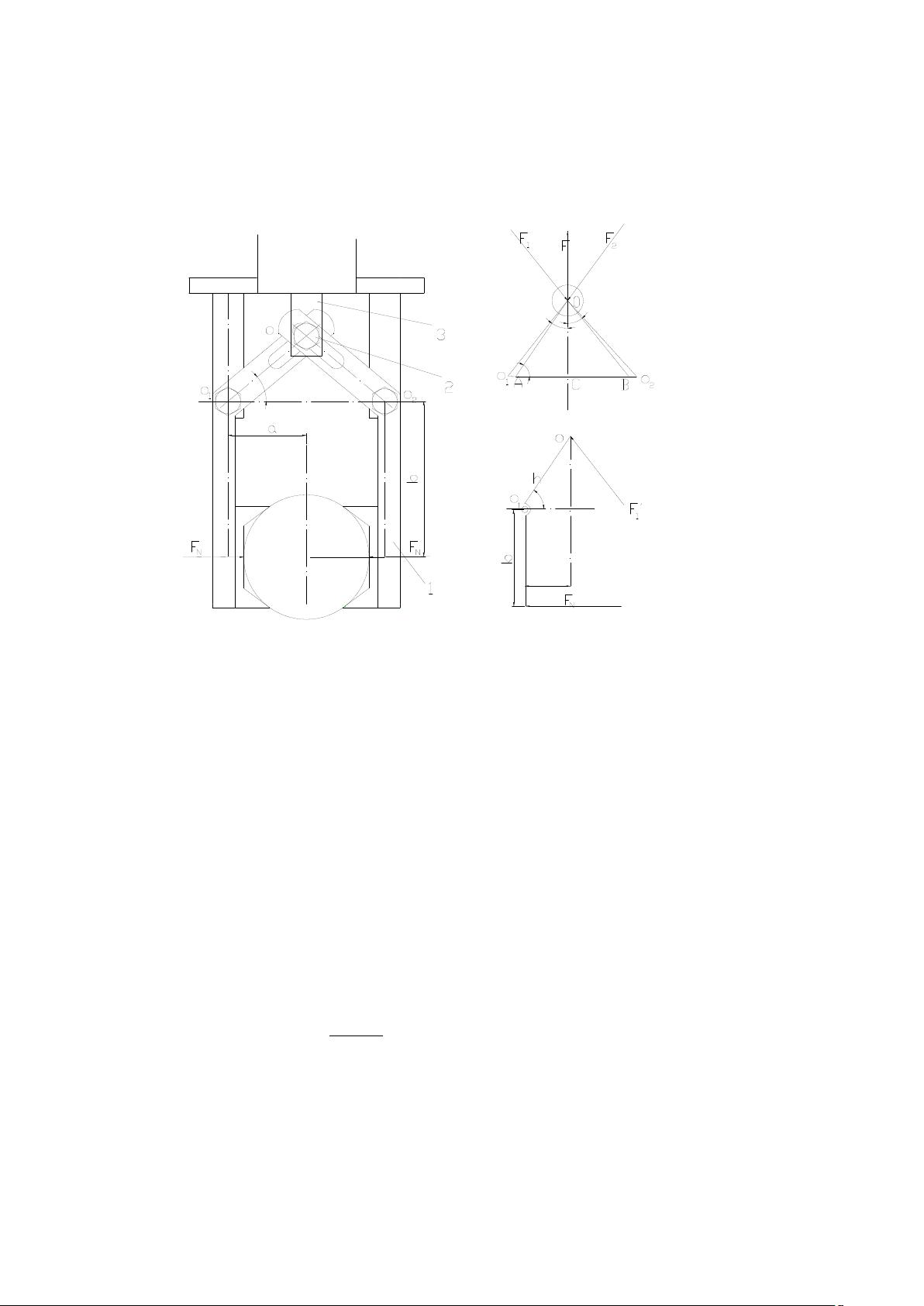
3.2 典型的手部结构
(1) 回转型 包括滑槽杠杆式和连杆杠杆式两种。
(2) 移动型 移动型即两手指相对支座作往复运动。
(3)平面平移型。
3.3 机械手手抓的设计计算
3.3.1 选择手抓的类型及夹紧装置
本设计是设计平动搬运机械手的设计,考虑到所要达到的原始参数:手抓张合角
g
D
=
0
60
,夹取重量为60Kg。常用的工业机械手手部
,
按握持工件的原理
,
分为夹持和吸附两大
类。吸附式常用于抓取工件表面平整、面积较大的板状物体
,
不适合用于本方案。本设计机
械手采用夹持式手指
,
夹持式机械手按运动形式可分为回转型和平移
型。平移型手指的张开闭合靠手指的平行移动
,
这种手指结构简单
,
适于夹持平板方料
,
且工件径向尺寸的变化不影响其轴心的位置
,
其理论夹持误差零。若采用典型的平移型手
指
,
驱动力需加在手指移动方向上
,
这样会使结构变得复杂且体积庞大。显然是不合适的,
因此不选择这种类型。
通过综合考虑,本设计选择二指回转型手抓,采用滑槽杠杆这种结构方式。夹紧装置
选择常开式夹紧装置,它在弹簧的作用下机械手手抓闭和,在压力油作用下,弹簧被压缩,
从而机械手手指张开。
剩余57页未读,继续阅读
2022-07-12 上传
2023-02-24 上传
2023-06-10 上传
2023-05-30 上传
2023-09-04 上传
2023-05-31 上传
2023-05-31 上传

南抖北快东卫
- 粉丝: 78
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
