Arduino智能小车设计:硬件与程序实现
需积分: 12 121 浏览量
更新于2024-07-25
收藏 540KB PDF 举报
"智能小車設計"
智能小车是一种集成了微处理器、传感器和执行机构的自动化设备,通常用于教育、研究或娱乐目的。在本文中,我们探讨的是一款基于AT89S52单片机的简易智能电动车设计,它可以按照预设模式自动运行,无需人工干预,适用于科学探索等应用。
1. 设计核心:
AT89S52单片机是整个智能小车的控制中心,它接收来自传感器的输入,并根据这些信息做出决策,以控制小车的速度和路径。这种单片机以其高性能和低成本而广泛应用于嵌入式系统设计。
2. 路面检测模块:
采用金属感应器TL-Q5MC作为主要传感器,它能够检测到路面上的铁片,为小车导航。当感应器检测到铁片时,会发送中断信号给单片机,单片机根据这些信号来决定小车的行驶方向和速度。
3. 速度检测:
霍尔元件A44E被用来检测小车的行驶速度。霍尔元件是一种磁性传感器,可以非接触式地测量磁场强度,进而推算出旋转速度或直线运动速度。
4. 显示模块:
1602LCD显示屏用于实时显示小车的行驶信息,如时间、距离、平均速度等。LCD的背光可以通过单片机控制,以便在行驶过程中节省电力。
5. 功能要求:
- 分区控制:小车需在特定区域以预设速度行驶,如C~D区和E~F区的低速行驶,以及D~E区的高速行驶。
- 数据记录:小车应自动记录行驶时间、距离和速度,同时记录每个路段的行驶时间,以便评估是否符合设计要求。
- S型控制:小车应具备自动转弯和寻迹功能,能够在S形轨道上行驶,并在离开轨道时自动停止,记录并显示行驶数据。
6. 方案选择与比较:
设计方案包括多个模块,如路面检测、显示、控制等,它们通过单片机进行集成。选择合适的传感器和显示设备对于实现智能小车的功能至关重要。
7. 实现难点与挑战:
在实际设计和制作过程中,可能需要考虑的因素包括传感器的精度、单片机编程的复杂性、电源管理以及机械结构的稳定性。此外,算法优化以确保小车准确跟踪路径和适应环境变化也是关键。
总结,智能小车的设计涉及到电子工程、计算机编程和机械工程等多个领域,是学习和实践Arduino等微控制器平台的理想项目。通过这样的项目,学习者可以深入理解自动化系统的原理和实现方法,为未来在机器人技术等领域的发展打下坚实基础。
4. 系统的具体设计与实现:
4.1 路面检测模块:
应用一个金属感应器 , 安装在车盘下 , 离地略小于或约四毫米 。 当金属传感器检测到铁
片时将对单片机发送中断信号 , 单片机运行中断 , 改变输给电机驱动信号的电压占空比来控
制小车的速度。
4.2 LCD 显示模块:
采用 1602LCD ,由单片机的总线模式连接。为节约电源, LCD 的背光用单片机进行控
制。
4.3 测速模块:
通过霍尔元件感应磁铁来产生脉冲 ( 当霍尔元件在离磁场较近时输出会是高电平,其它
时候是低电平 ) ,一个车轮均匀放四个小磁铁,计算一秒所得的脉冲数,从而计算出一秒小
车轮子转动圈数,再测量出小车车轮周长即可计算出小车当前速度,累加可得到当前路程 。
4.4 控速模块:
考虑到元器件的缺少以及我们所用的电路的驱动电机的电路原理图和和小车自带的电
路的电机驱动原理图一样,所以暂时使用小车自带的电机驱动电路图。
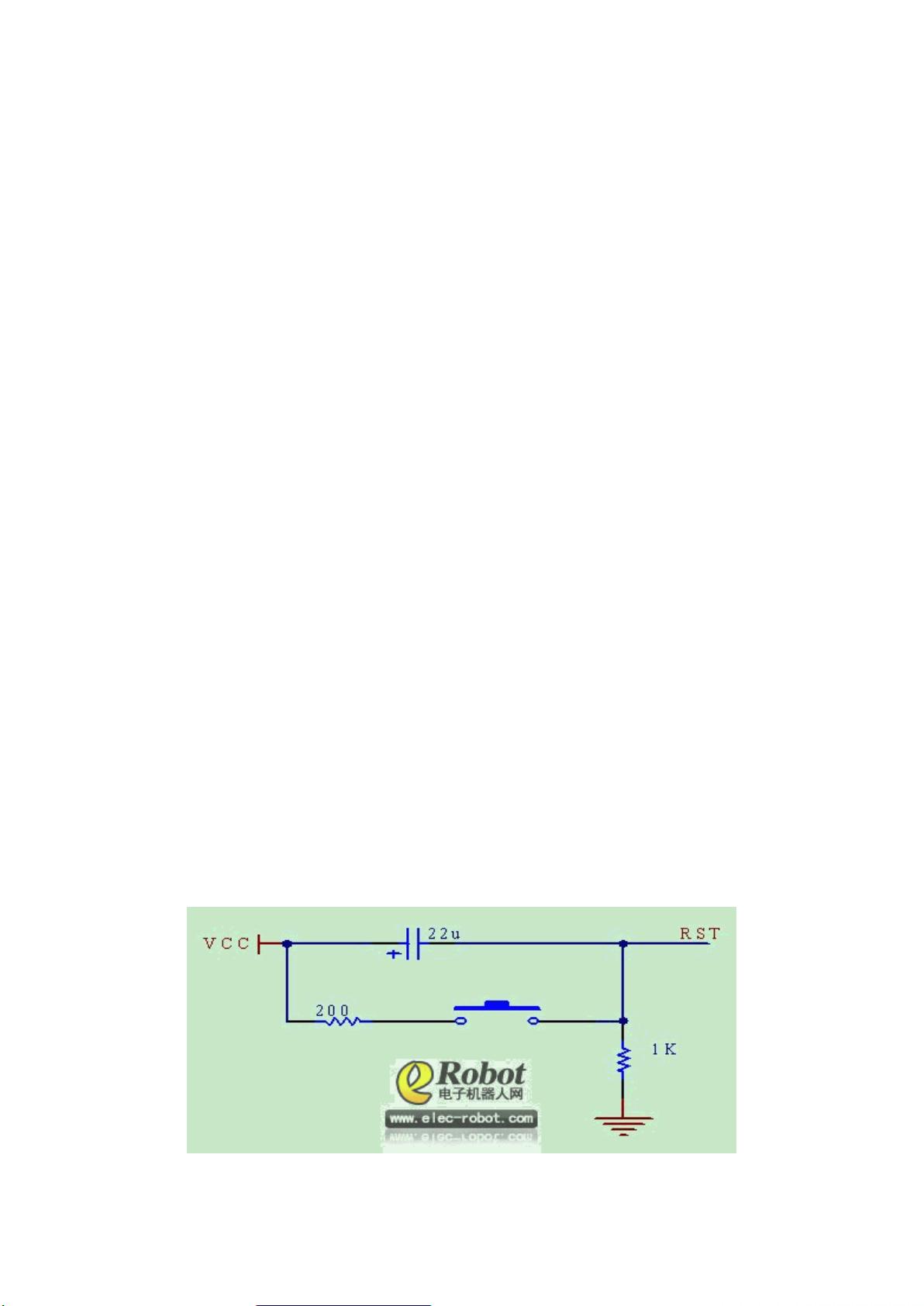
4.5 复位电路模块:
单片机的复位电路通过手动来实现,复位电路图如 ( 图 8) 所示。

剩余45页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2014-03-07 上传
2009-05-27 上传
2020-10-21 上传
2013-12-12 上传
2013-07-23 上传

gmmgoo
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
