ROS多机器人系统教程:创建监控节点
需积分: 9 97 浏览量
更新于2024-07-18
收藏 1.42MB PPTX 举报
"ros_multi_lesson3 - ROS多机器人系统教程"
在ROS(Robot Operating System)中,构建一个多机器人系统是一项复杂但重要的任务。本资源是一个关于ROS多机器人系统的课程,旨在帮助你理解和掌握如何在ROS环境下操作多个机器人。课程由Roi Yehoshua作为教学助手,提供了一个名为“Lesson3”的部分,主要讲解了如何创建一个监控节点来管理多个机器人的状态。
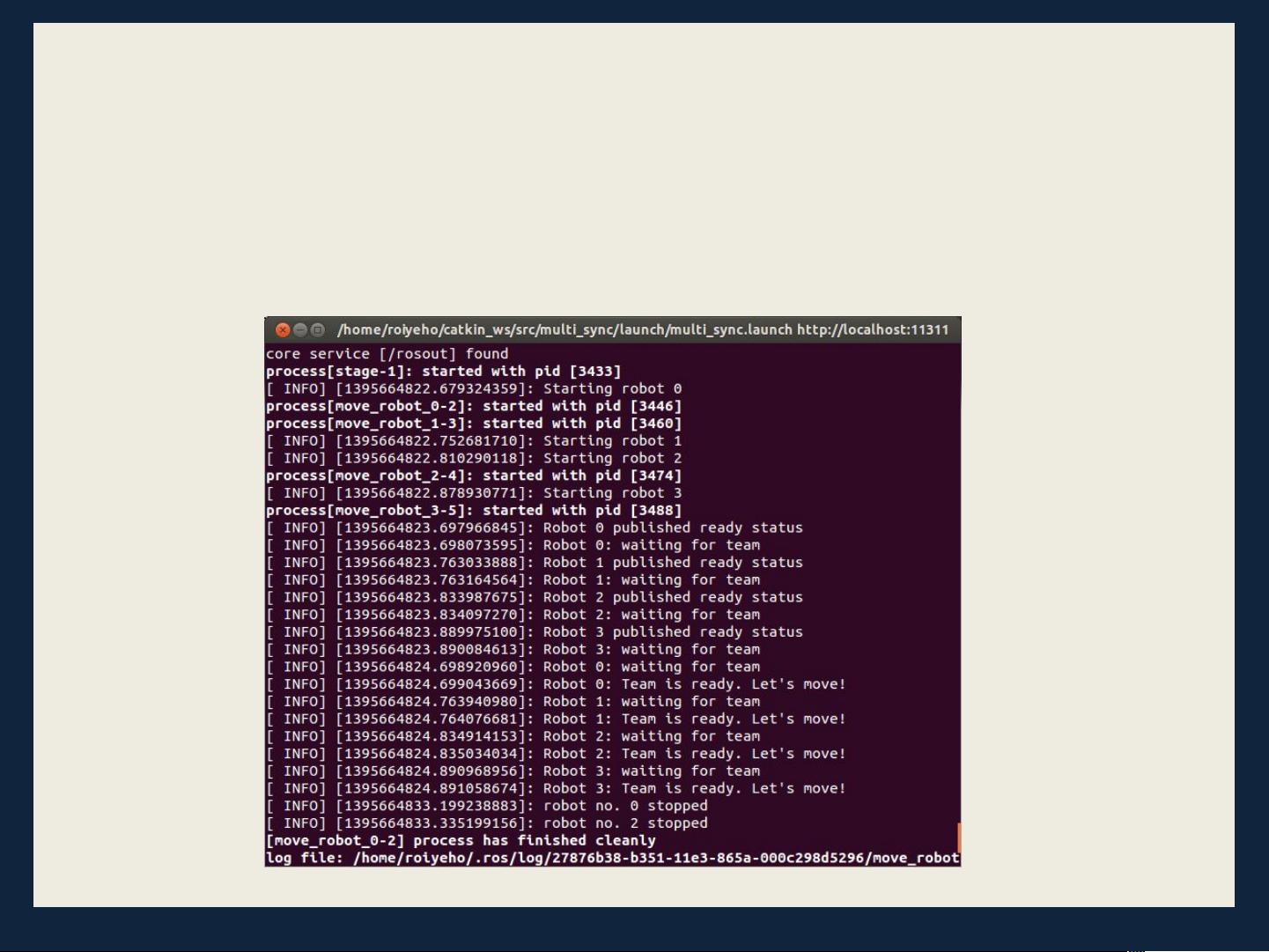
首先,课程提到了创建一个监控节点,这个节点的作用是监听“ready”消息,并在所有机器人准备就绪时发布通知。监控节点接收团队规模作为参数,以便知道需要监控多少个机器人。为了实现这一功能,你需要在你的ROS包中添加一个名为`monitor.cpp`的源文件。
在`monitor.cpp`的代码中,可以看到几个关键部分。首先,包含了必要的头文件,如`ros/ros.h`用于ROS的基本操作,以及自定义的消息类型`multi_sync/RobotStatus.h`,这个消息类型用于表示每个机器人的状态。接着,定义了一些变量,如团队总大小`teamSize`,当前已知准备好的机器人数量`robotsCount`,以及一个布尔数组`robotsReady`来记录每个机器人的准备状态。此外,还声明了订阅器`team_status_sub`来接收机器人状态消息,以及发布器`team_status_pub`来发布团队状态更新。
在`main`函数中,检查了命令行参数,确保用户指定了团队规模,并将其转换为整数。然后,通过比较团队规模与预设的最大机器人数量(`MAX_ROBOTS_NUM`),确保规模在合理范围内。如果团队规模超出范围,程序会打印错误消息并返回负值。
接下来,`teamStatusCallback`函数被定义为订阅器的回调函数,它会在接收到每个机器人的状态消息时被调用。在这个回调函数中,通常会更新`robotsReady`数组和`robotsCount`变量,根据接收到的状态消息来判断机器人是否已经准备好。
当所有机器人都准备就绪时,监控节点会通过`team_status_pub`发布一条消息,通知系统所有的机器人已经准备完毕。这个机制对于协调多机器人系统的任务分配和执行顺序至关重要。
这个ROS课程的Lesson3重点介绍了如何设计和实现一个监控节点,用于管理多机器人系统中的机器人状态,以及如何通过ROS的消息传递机制进行通信。这为构建更复杂的多机器人协作任务奠定了基础。
$
A
•
%)B
)'
!"#$%

剩余49页未读,继续阅读
2021-03-28 上传
2022-04-10 上传
2022-07-14 上传
2018-04-03 上传
2024-08-26 上传
2021-06-23 上传
2022-07-14 上传

ni_bu_yao_ni
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
