优化低占空比传感器网络事件检测算法
187 浏览量
更新于2024-07-15
收藏 1.31MB PDF 举报
"这篇论文探讨了优化低占空比传感器网络中的事件检测问题,强调了在节能策略下如何有效提高事件检测效率。作者包括Yanmin Zhu、Yunhuai Liu和Lionel M. Ni,文章于2011年在线发表在Springer Science+Business Media, LLC上。"
在无线传感器网络中,占空比循环是一种普遍采用的节能策略,然而,它可能导致事件检测的延迟或漏检,尤其是当传感器的工作周期较低时。论文深入研究了事件检测与能效之间的基本关系,通过一个相对简单的模型,计算了检测延迟和可检测性的封闭形式,从而量化了事件检测的性能。这种量化分析对于理解和优化传感器网络的设计至关重要。
作者还揭示了检测性能和系统寿命之间的内在权衡。这种权衡意味着在追求更高的能效时,可能会牺牲一定的检测速度或准确性,反之亦然。因此,设计者需要在两者之间做出平衡,以满足特定应用的需求。
论文提出了一种名为CAS(CooperativeAwakeScheduling)的分布式算法,该算法完全本地化,不需要依赖位置信息,便于实施且能够适应不同规模和密度的网络。CAS算法旨在协同决定传感器的唤醒时间,以提高事件检测的效率。
通过对CAS算法的理论分析和实验验证,结果显示其在检测等待时间和检测概率方面显著提升了事件检测性能。与随机独立的唤醒方案相比,CAS算法可以减少高达31%的检测延迟,同时提升最多25%的检测能力。这些改进对于低占空比传感器网络的优化运行具有重要意义。
此外,论文还研究了事件检测的理论界限,这为比较不同的检测策略提供了基础。通过对这些界限的研究,可以更好地理解算法的潜力和限制,从而推动未来更高效、更具适应性的解决方案的发展。
这篇论文为低功耗无线传感器网络的事件检测提供了一种新的视角和实用工具,对于提升网络性能和延长系统寿命具有实际指导价值。通过深入理解占空比循环对检测性能的影响,以及开发如CAS这样的创新算法,可以更有效地应对低占空比环境下的事件检测挑战。
communication protocols. We only study the duty cycling
of the sensing device. The transceiver does not necessarily
have the same duty cycle with the sensing device. The
consequent advantage is the flexibility for our protocol to
work with different communication protocols. It is
important to note that a sensor node can actually be
attached with multiple sensing devices of different types.
For simplification, however, we assume that a sensor node
is equipped with a single sensing device throughout the
analysis and the protocol design. Nevertheless, they can be
easily extended to support the situation where a sensor
node has multiple sensing devices. Later, we call a sensor
node just a sensor for short if it is not confused with the
sensing device.
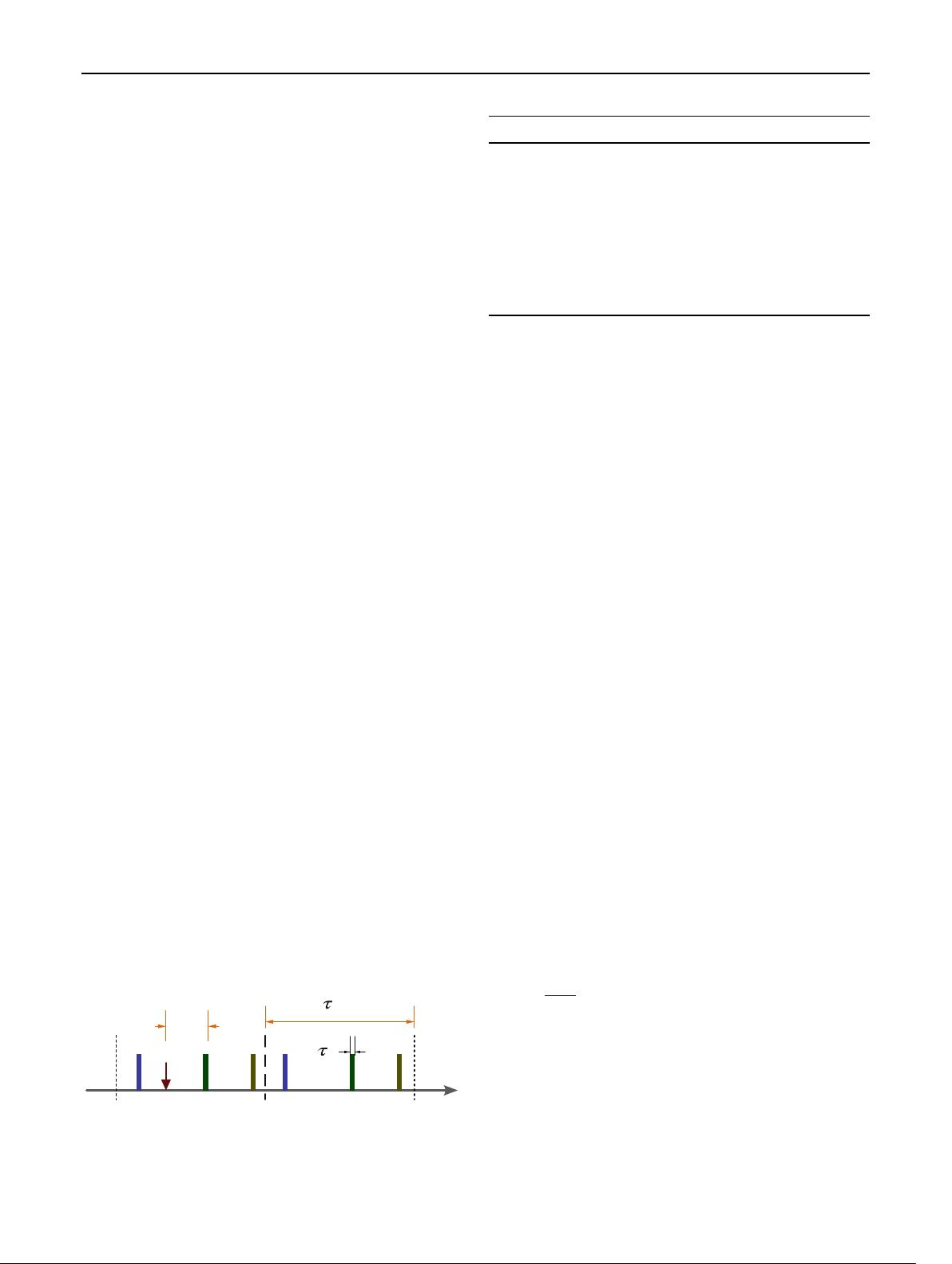
In the analysis, we consider a simple algorithm, in which
each sensor wakes up periodically, once in every cycle. In
the rest of the cycle, the sensor stays in power-save mode.
The wakeup selection is random and independent of other
sensors. We refer to this algorithm as RIW. We are inter-
ested in low duty-cycled sensor networks. Thus, we can
safely assume that s
on
s
cycle
. The example timing of
three sensors with RIW is shown in Fig. 1.
The detection delay of an event, denoted by D,is
defined as the amount of time elapsed from the instant
when the event occurs to the instant when the first sensor
detects it. D is a random variable because the factors that
determine the delay, such as event arrival time, covering
sensors and their wakeups, are all unpredictable. The
detectability of an event with duration t is the probability
that it can be detected by at least one sensor. The detect-
ability of an event is 100% if its duration exceeds the
sensor cycle. Although events are usually persistent, we
still study the detectability of an event whose duration is
shorter than the sensor cycle since it reflects the capability
of the network to capture events. We study the detection of
any event that occurs anywhere within the field and arrives
at any time.
In the rest of this paper, we adopt the notations shown in
Table 1 and make the following assumptions.
2.1.1 Binary detection model
Each sensor has a sensing range. An event is reliably
detected by an active sensor if its distance to the sensor is
less than the sensing range. More sophisticated models
suggest that the detection probability is related to the dis-
tance between the sensor and the event. For simplification,
we assume that the sensing range is selected such that an
event can be detected with high probability if its distance to
the sensor is less than the sensing range.
2.1.2 Time synchronization
We assume the time synchronization mechanism is avail-
able for loose time synchronization. Protocols for clock
synchronization in sensor networks can be found in [26]. It
has been reported that accuracy on the order of millisec-
onds can be achieved.
2.1.3 Stationary events
After an event has occurred, it remains at the location
where it happens. In some cases, events are caused by
moving objects. As long as the moving speed of objects is
slow, our approach can still apply. If objects move fast,
sensors have no choice but keep active all the time.
2.2 Theoretical analysis of event detection
We analyze detection delay and detectability given a fixed
sensor cycle. Since s
on
s
cycle
, we firstly assume that s
on
is negligible for analysis simplicity. The complete analysis
with consideration of s
on
follows.
Lemma 1 A point is covered by k sensors, and their
wakeups are fixed values w
i
, and w
i
w
iþ1
, 1 i k 1.
The delay expectation of any event at this point is
Eð DÞ¼
1
s
cycle
X
k
i¼1
w
2
i
X
k
i¼1
w
i
w
ðiþ1Þmodk
ðw
1
w
k
s
cycle
=2Þs
cycle
!
:
ð3Þ
Note that in Lemma 1, we fix both the set of covering
sensors and their wakeups. Next, we relax the assumption
of fixed wakeups and give Lemma 2.
A
BC
cycle
on
Time
Event
delay
Fig. 1 Example timing of three sensors with RIW
Table 1 Main notations adopted in this paper
Notation Description
R
s
The sensing range
R
t
The communication range
n Initial amount of energy on every sensor node
Pr(E) The probability that event E occurs
E(X) The expectation of random variable X
l The expectation of detection delay
r The standard deviation of detection delay
v(t) The detectability of an event with duration t
Wireless Netw (2012) 18:241–255 243
123
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
2020-10-21 上传
2021-09-29 上传
2021-06-13 上传
2014-05-18 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38706055
- 粉丝: 5
- 资源: 908
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
