KUKA机器人控制与Profibus通信编程指南
"这份文档是关于KUKA机器人控制的,特别是针对KRC2控制器的Seminarworkbook,涵盖了FieldBus Technology - Profibus Release 4.x, 5.x的相关内容。文档发布时间为2004年4月,由KUKA Roboter GmbH出版,主要涉及KUKA机器人与外部设备通过Profibus进行通信的编程和操作。"
在工业自动化领域,KUKA机器人是领先的制造商之一,其产品广泛应用于各种工业生产环境中。KUKA机器人控制系统(KRC)是其核心部分,而KRC2是其中的一个特定控制器型号,负责协调和管理机器人的运动和功能。
FieldBus技术是一种用于设备间通信的工业网络标准,它允许不同设备在生产线上相互通信,减少了硬连线的需求,提高了系统的灵活性和效率。Profibus(Process Field Bus)是FieldBus家族中的一种,尤其适用于工厂自动化和过程自动化。本手册详细介绍了如何将KUKA机器人与Profibus系统集成,使机器人能与生产线上的其他设备进行数据交换,实现更精确的协同工作。
文档中的"1. Introduction to fieldbus technology"章节可能涵盖了以下知识点:
1. 为何使用总线系统(Why bus systems?):讨论了采用总线系统的原因,如降低成本、提高互操作性、简化布线等。
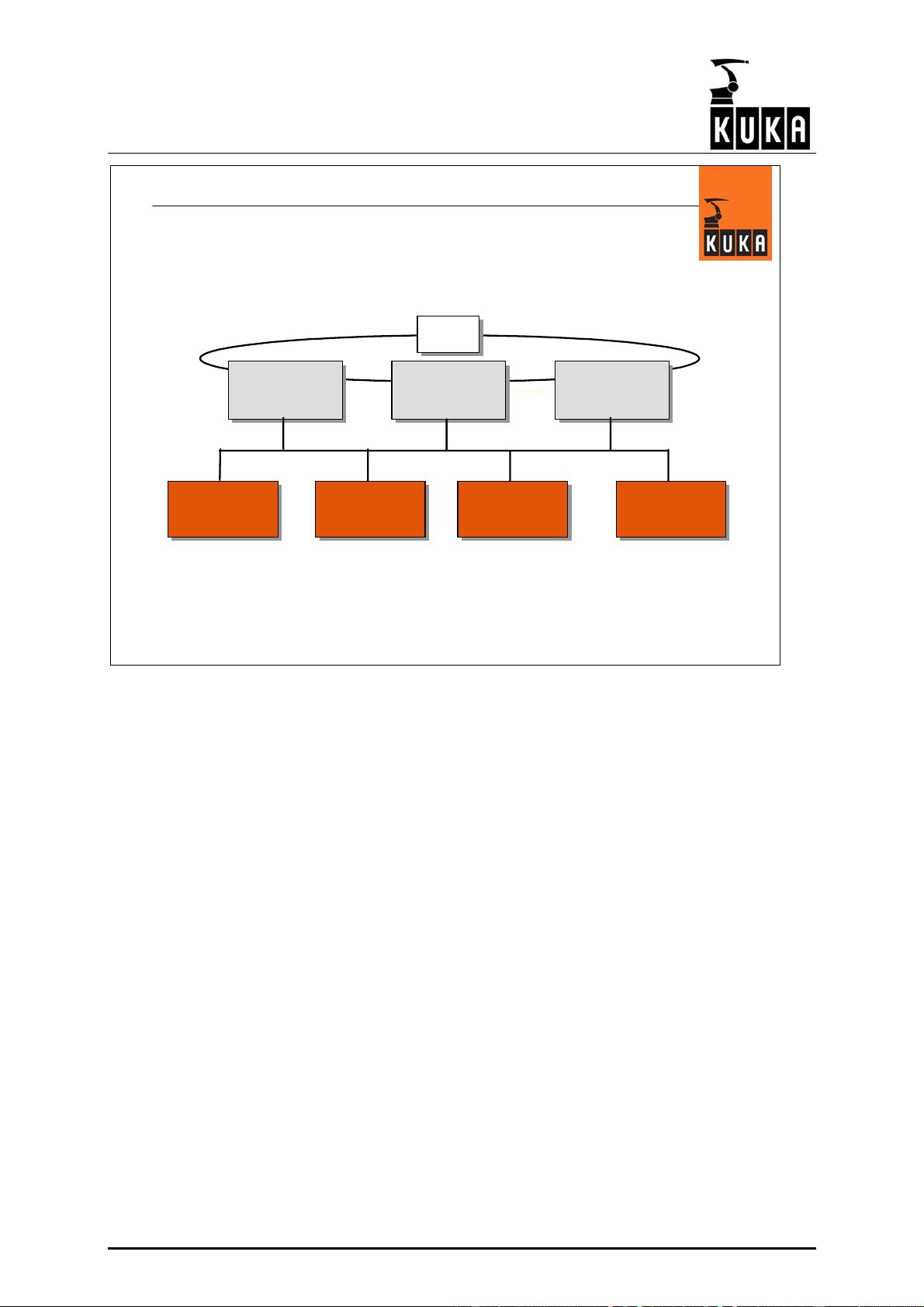
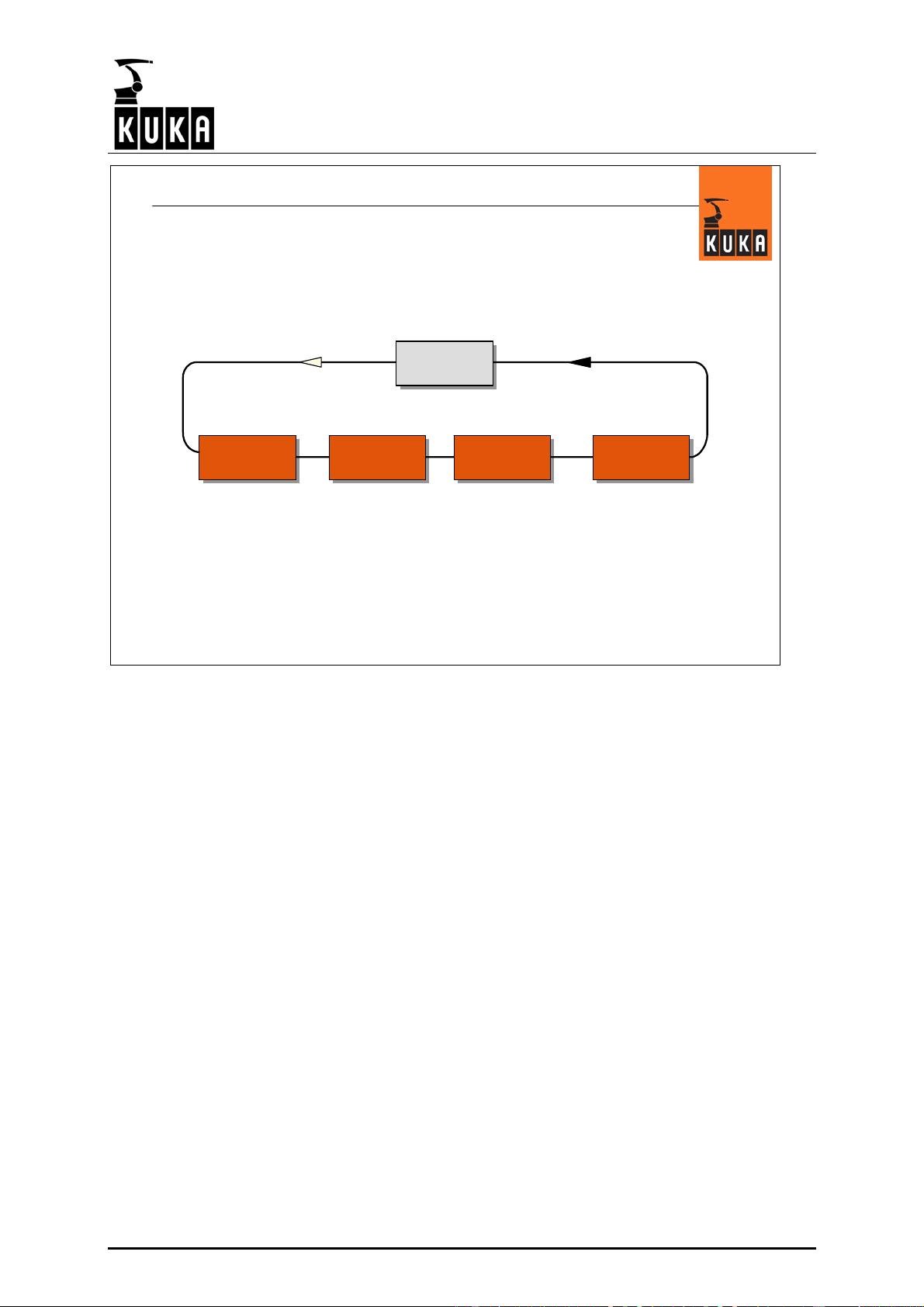
2. 总线拓扑和访问方法(Bus topologies, bus access methods):介绍了总线的物理布局(如总线型、环形、星型等)以及数据传输的控制机制(如主从结构、令牌传递等)。
"2. Profibus basics"章节可能包括:
2.1 功能原理:讲解了Profibus的工作原理,包括协议栈、数据传输速率、最大设备数量等基本概念。
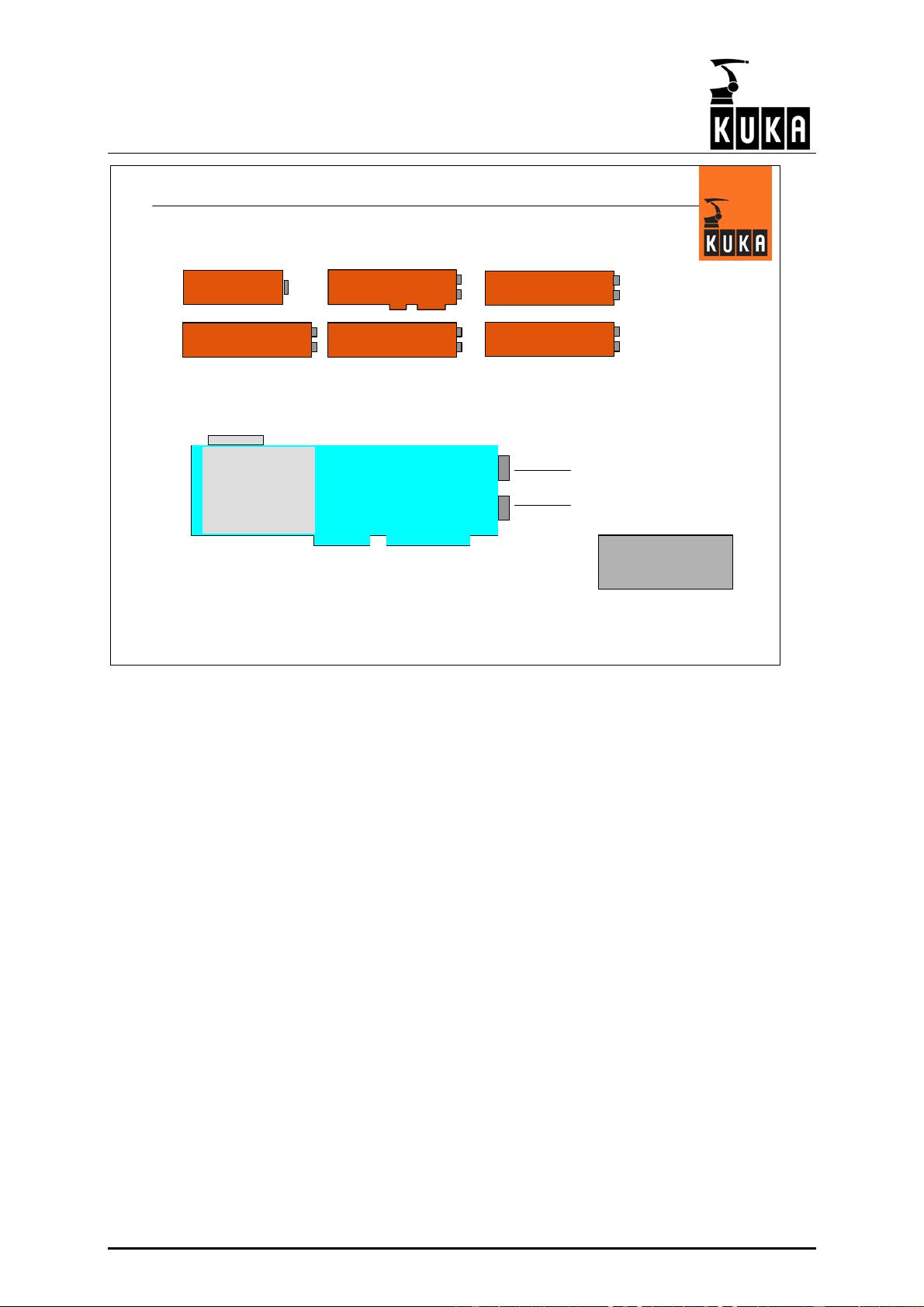
2.2 物理层和数据链路层:可能详细阐述了Profibus的物理接口标准(如RS-485)以及数据帧结构。
2.3 服务和应用:可能涵盖了Profibus支持的不同应用层服务,如过程数据通信、I/O通信等。
2.4 网络配置和故障排除:可能介绍了如何设置和维护Profibus网络,以及遇到问题时的诊断和解决步骤。
由于文档内容可能涉及到更多细节,如实际编程示例、配置步骤、错误处理等,实际操作人员需要深入学习并理解这些内容才能有效地控制和编程KUKA机器人与外部设备的Profibus通信。对于想要在KUKA机器人环境中实现高效自动化的人来说,这份手册是宝贵的参考资料。
Page 16 of 163 Workbook FBT PRB KR C2 04.04.01
I 03.09.2003 I College I PRhI 7
KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de
© Copyright by KUKA Roboter GmbH College
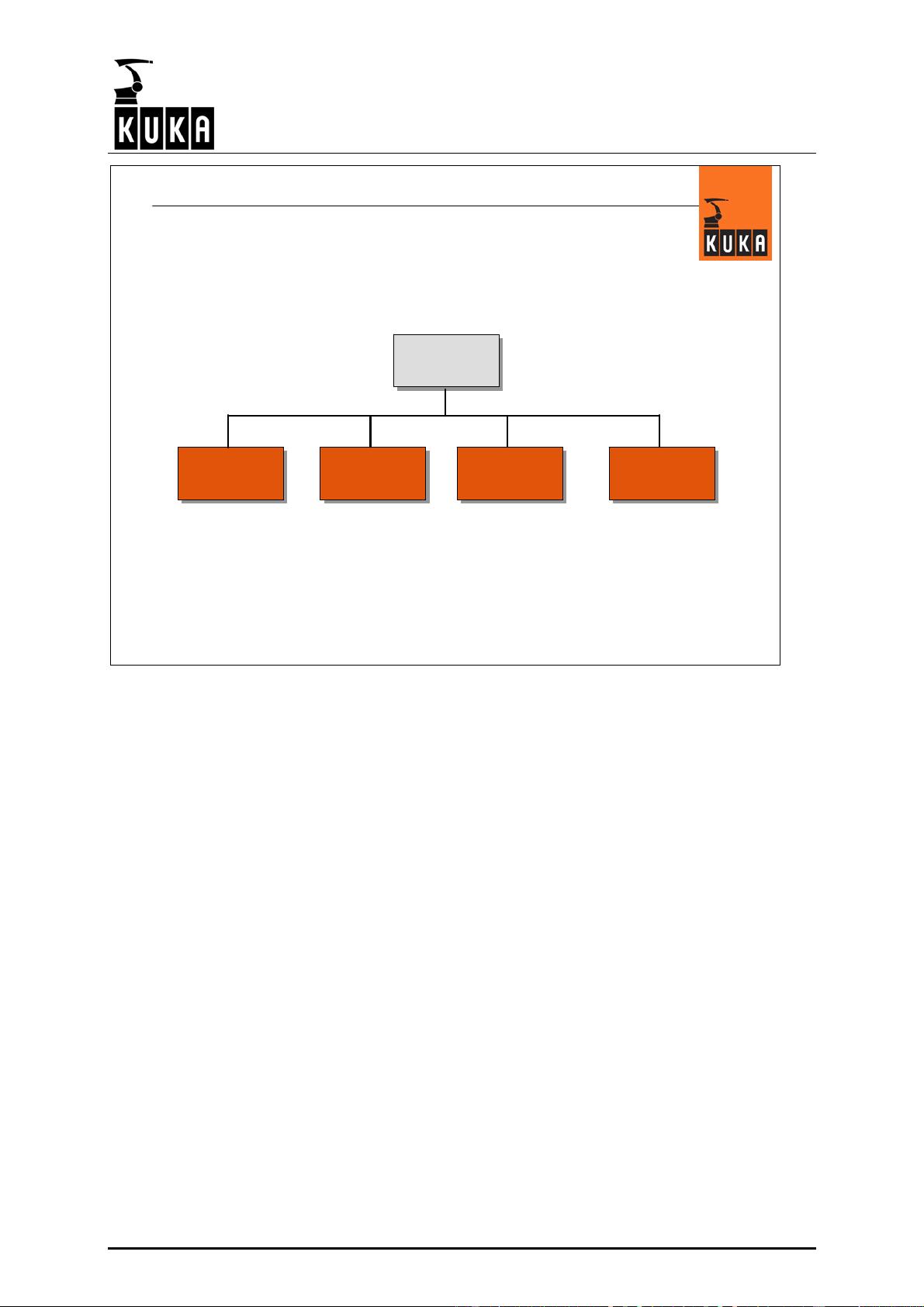
Master/slave (Profibus or DeviceNet)
Master
Slave Slave Slave Slave
Master/slave
In the master/slave bus access procedure, the bus traffic is controlled by the master.
The slaves answer only in response to a prompting telegram from the master.
Otherwise the slaves remain passive.

剩余162页未读,继续阅读
7039 浏览量
1876 浏览量
451 浏览量
243 浏览量
130 浏览量
188 浏览量
点击了解资源详情
262 浏览量

qq_28289813
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- JBPM工作流开发完全指南
- 深度解析:软件应用安全的忽视盲点与全面保障
- C#版设计模式手册:掌握23种经典模式
- LM2575系列 SIMPLESWITCHER® 1A Step-Down 电压调节器概述
- 深入Linux编程:探索高级技术
- XFire开发实战指南:从入门到精通
- Hibernate 快速入门指南
- ACM经典编程实例:C源码100例
- MIT入门指南:VHDL基础与电路设计
- MATLAB 7技术编程入门指南
- C#编程:委托和事件深度解析
- PIC单片机C语言编程入门与资源推荐
- 2009考研计算机统考大纲:数据结构与算法详解
- Linux设备驱动开发权威指南:全面升级至2.4版
- 高校校园网组网与设计方案详解
- Java中的构造器与初始化清理
