Telemecanique Unity Pro 2006通讯块库手册:操作与功能介绍
需积分: 10 79 浏览量
更新于2024-07-16
收藏 8.36MB PDF 举报
本资源是一份关于Telemecanique Unity Pro的通讯块库手册,出版日期为2006年,针对的是中国市场的中文版本。这份手册详细介绍了Telemecanique Unity Pro系统中的各种通讯功能块,对于从事自动化控制、工业通讯或PLC编程的工程师来说具有极高的参考价值。
首先,手册的核心内容涵盖了多个章节,如操作通信元件(Operation of the communication EFs)、高级模块的通信(如Premium-Atrium Zczt系列),包括了不同功能块的操作如地址读取(ADDRF8H)、取消命令(CANCELF5K)、数据交换(DATA_EXCHF00)等。这些块是基于Modbus Plus协议进行设计的,展示了如何通过这些功能来与PLC设备进行高效的数据传输和控制,如输入字节(INPUT_BYTEF)和字符(INPUT_CHARF)处理,以及主从Master Function(MBP_MSTRF)的实现。
在每个功能块的描述部分,手册提供了详细的参数说明、操作方法以及可能使用的数据结构(如Zc_、Z0、80等)。例如,CANCELF5K的功能是取消某个特定操作,而CREAD_REGF用于读取寄存器数据,CWRITE_REGF则负责写入数据。此外,手册还强调了错误处理和确认机制,如数据交换时的错误检查($%2]%P)和响应信号(zt;L、!]80)。
值得注意的是,手册中提到的"Peercop"可能是与通信网络中的对等节点(Peer-to-Peer communication)相关的概念,表明Telemecanique Unity Pro支持多设备间的协作和数据共享。同时,PCTE4pa可能是某种特定的编程工具或接口,用于方便用户进行编程和调试。
这份手册不仅提供了技术细节,还揭示了Telemecanique在2006年时的工业自动化通信解决方案,对于研究该时期的技术变迁,或者在实际项目中应用Telemecanique产品的开发者来说,都是极其宝贵的资料。掌握这些通信块的使用,能够提升系统的集成性和效率,是工业自动化工程师必备的技能之一。
16 33003683 06/2006
_f4
_f4 Unity Pro |R¡v\k__f4X&z_f4_O'AB^ FFBX
vZQ4vcQ_f4F
z D>zt (EF)
z D>zt_ (EFB)
z 14_zt_ (DFB)
z f0
D>zt D>zt (EF) "z}jG!XPO2]Qtk8Sm}MWzt%8n24Q¡^
tk_X^P8m}MW.syQt{_zt&uj_%O¡^O,_X
0e@B04FDB - LD5|8D>zt¡"+Gy2]-Oy24__%7
s
|X2]:y¡~_%7_@z8A24:y¡~_%7_RzXzt_lt41
ztf45m|0_%7_|[X
0$,D>zt|82]Q_]4Nv*{X
D>zt_ D>zt_ (EFB) oz}jG!XPO2]Q\78m}MW%8n24QNt\
kX^P8U]._24Q^R*_X
0e@B04FDB - LD5|8D>zt_¡"+Gy2]-Gy24__%7s
|X2]:y¡~_%7
_@z8A24:y¡~_%7_RzXzt__lt
41zt_f45m|0_%7_|[X2^ltm|0_%7_YGX
14_zt_ 14_zt_ (DFB) oz]D>zt_tk_4GX:zt_)¡|,¡h0B0
FBDWLDWIL -/[ ST U7X
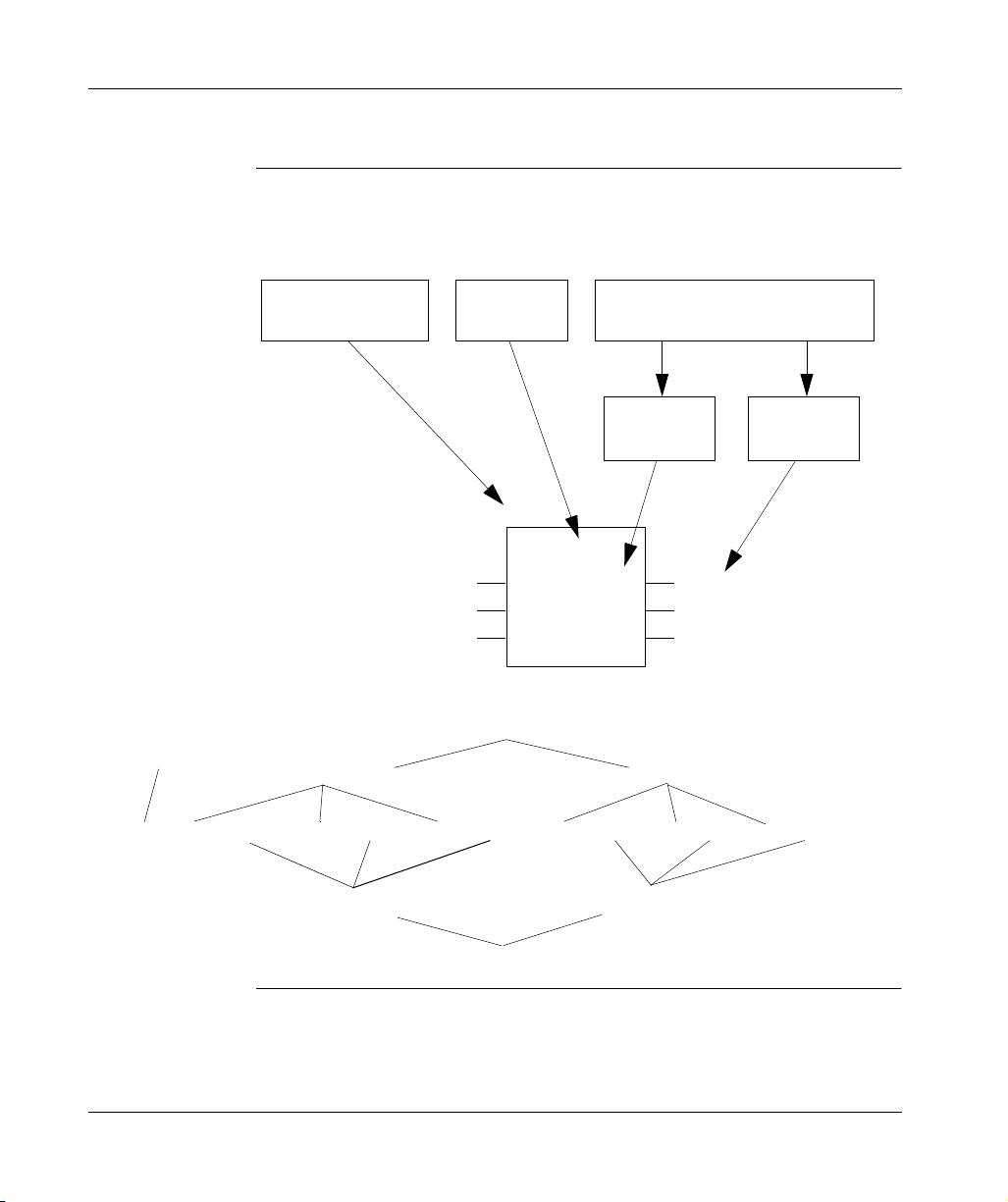
f0 _fAYI8f0O^ztX
]D>zt_qOWe^8f0NvzGy24c{( VAR_IN_OUT ]6f4_
74X
f0\sEQX
f0^. IEC 61131-3 _p=8cD2b8/¡X
f0]D>zt;Dq"z=m_WeX
_f4)n0¡
剩余395页未读,继续阅读
151 浏览量
2019-10-31 上传
2019-09-20 上传
2019-09-20 上传
2019-09-20 上传
161 浏览量
2019-09-20 上传
122 浏览量
2019-09-20 上传

weixin_38743481
- 粉丝: 698
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- CVS与配置管理.ppt
- linux命令大全~~~~~~
- 软件测试规范使你更加了解软件测试的规则
- sql语法帮助大全sql
- CISCO IOS名称意义详解
- Measurement technique for characterizing memory effects in RF power amplifiers
- Eclipse中文教程
- Microsoft Introducing Silverlight 2.0
- MyEclipse6 中文教程
- Java水晶报表教程
- Linux菜鸟过关(赠给初学者)
- Test.Driven.TDD.and.Acceptance.TDD.for.Java.Developers
- 编写高效简洁的C语言代码
- AIX 5L 安装手册
- Linux下的shell与make
- C#.Net函数方法集
