CiA 402驱动与运动控制设备配置文件:操作模式与应用数据
需积分: 5 130 浏览量
更新于2024-07-09
收藏 3.22MB DOCX 举报
CiA-402-2 版本 3.0.0 是一个针对驱动器和运动控制的设备配置文件,它定义了CANopen网络上这些设备的操作模式和应用数据。这份文档是CiA(CAN in Automation)成员专有的,可能会在没有通知的情况下进行修改。该文档的历史版本,CiA402,在2007年12月更新至3.0版本,取代了2002年7月的CiADSP402版本2.0。
CiA402 CANopen 设备配置文件是国际标准化组织IEC(International Electrotechnical Commission)的一部分,具体体现在IEC61800-7系列标准中。这个配置文件主要涵盖了驱动和运动控制设备的操作模式和应用数据,旨在促进这些设备在CANopen网络上的互操作性和一致性。CANopen是一种基于CAN(Controller Area Network)协议的高层通信协议,广泛应用于工业自动化领域。
在CiA402版本3.0.0中,进行了全面的审查和重构工作,简化了设备的实现过程,通过删除一些对象字典条目来降低复杂性。同时,为了适应更多应用场景,引入了新的操作模式,这使得驱动和运动控制设备的功能更加强大且灵活。
编辑注释指出,此规范集的第一部分提供了基本信息和前言,暗示还有其他部分详细阐述了CiA402的其他方面,如配置、通信和服务等。对于开发和集成CANopen驱动器和运动控制系统的工程师来说,理解并遵循CiA402标准至关重要,因为它确保了不同供应商的设备可以在同一网络上协同工作,提高了系统的兼容性和可扩展性。
此外,CiA402还规定了设备的状态机模型,包括启动、停止、故障恢复等操作,以及参数设置、故障检测和诊断等功能。这些特性使得CiA402成为驱动和运动控制领域的一个标准框架,帮助开发者快速构建符合国际标准的解决方案。
CiA402-2 版本 3.0.0 提供了一个详细的驱动器和运动控制设备操作规范,通过CANopen协议实现设备间的高效通信,其更新和优化旨在提高设备的易用性和功能多样性,对于工业自动化领域的工程师而言,是一份重要的参考资料。

Drives and motion control device profile – Part 2: Operation modes and application data
CiA 2007 – All rights
11
5.1
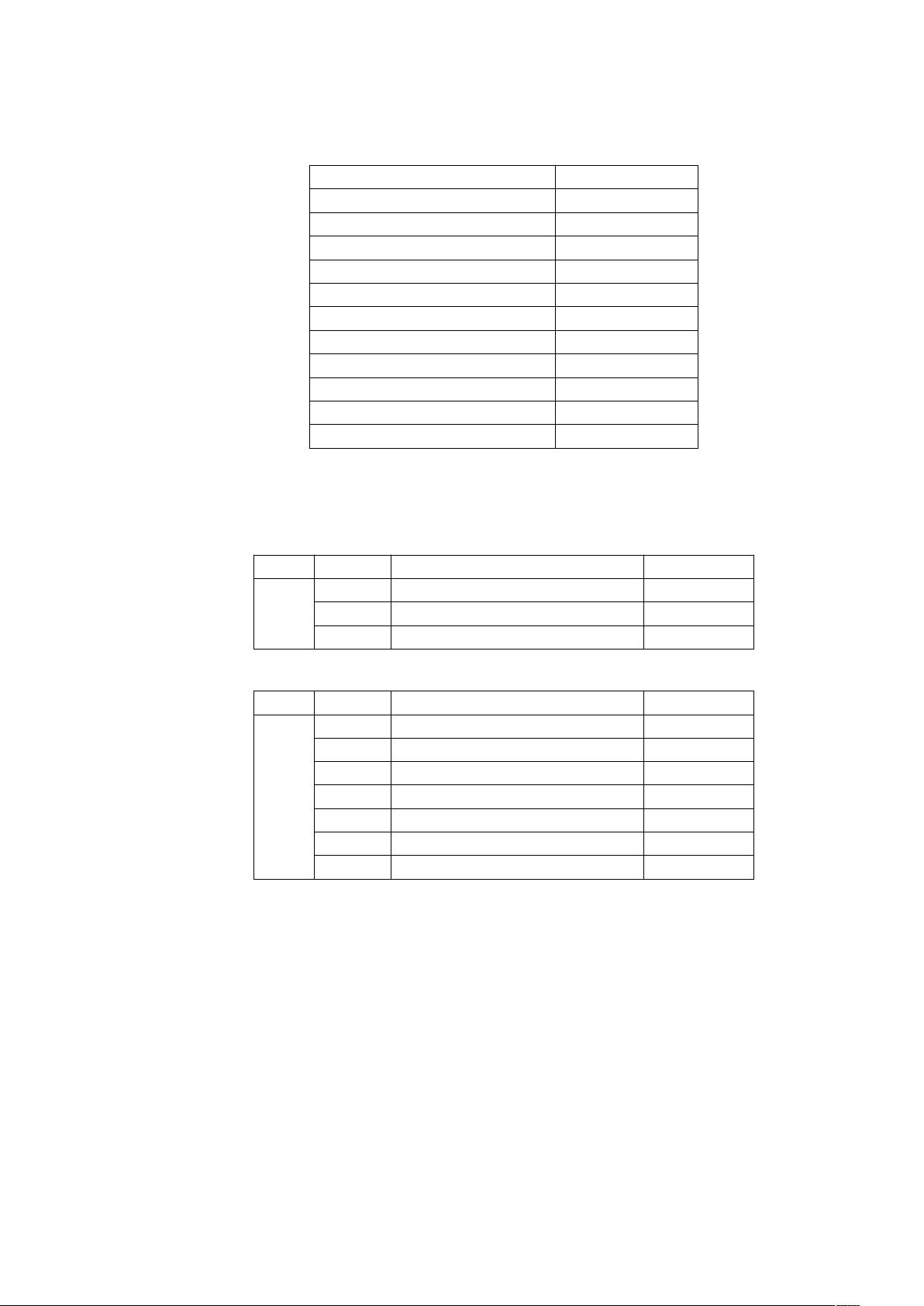
Standard data types
The data types used in this profile are listed in Table 1.
剩余63页未读,继续阅读
4584 浏览量
668 浏览量
555 浏览量
261 浏览量
332 浏览量
447 浏览量
107 浏览量
1328 浏览量
132 浏览量

BlueSky
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 刘易斯码
- 文华指数数据服务API程序demo
- XXXX酒店商业计划书
- expense_tracker
- 维控上位机记录数据管理软件.rar
- nativescript-input-validator-ng2:使用class-validator的本机ng2输入验证组件示例
- CommunityDetection:我的论文的主意,只是为了做实验
- 唤醒圣诞老人HTML5游戏源码
- Projekt-2:小米市长
- 天气React:第一个天气应用经过重新编写后具有react
- Roblox-camping-trip:帮助孩子社交,了解露营和荒野并获得很多乐趣的一种方式!
- 机械手程序200.rar
- 信捷 触摸屏专用画面编辑软件Twin V2.D.2q.zip
- deluge2-win7
- BUPT计算机大三Linux实验1-4
- nativescript-get-device-orientation-util:NativeScript实用程序,用于在IOS和Android设备上获取设备方向
