时变时滞系统鲁棒神经控制:反冲滞后输入
102 浏览量
更新于2024-07-14
收藏 1.18MB PDF 举报
"一类具有反冲滞后输入的时变时滞系统的鲁棒自适应神经控制"
本文探讨的是针对带有反冲滞后输入的时变时滞系统的鲁棒自适应神经控制策略。在控制系统设计中,时变时滞是普遍存在的问题,它可能导致系统性能下降甚至不稳定。反冲滞后输入,也称为非线性滞后,是一种常见的非线性现象,常见于机械系统中,如齿轮副、摩擦力等,其特性会导致控制难度增加。
该研究提出了一种动态表面控制(DSC)方案,用于处理这类复杂系统。动态表面控制是一种高级的自适应控制技术,通过在系统控制层面引入额外的表面变量,来简化高阶系统的控制设计,并减少由于微分项引起的稳定性问题。
首先,通过变换函数,该方法确保了跟踪误差的预定瞬态性能。这意味着,即使存在时变时滞和反冲滞后输入,也能对系统误差进行精确且快速的调整,从而达到期望的跟踪性能。
其次,通过估计神经网络未知权重向量的范数,可以显著降低计算负担。神经网络作为非线性函数的逼近工具,能有效处理系统中的不确定性。估计权重范数有助于在线调整神经网络参数,同时减轻了控制器的计算压力。
再者,采用DSC方法解决了复杂度爆炸的问题,这是传统自适应控制策略中常见的挑战。DSC方法通过合理的设计,避免了高阶导数的存在,从而减少了系统的复杂性和可能的不稳定性。
论文证明了提出的控制策略能确保所有闭环信号都保持一致最终有界。这表明系统在长期运行中能够保持稳定,且误差会收敛到一个有限的范围内。
关键词包括:动态表面控制、未知时变时滞、预定跟踪误差性能,这些关键词揭示了研究的核心关注点。模拟结果验证了所提控制策略的有效性,表明这种方法在应对具有反冲滞后输入的时变时滞系统时表现出良好的控制性能。
这篇研究论文为解决具有复杂非线性和时变特性系统的控制问题提供了一个新颖而实用的解决方案,对实际工程应用具有重要的理论和实践价值。
X. Zhang et al.: Robust Adaptive Control for Nonlinear Time-Varying Delay System
A3. The desired trajectory y
r
is smooth and available
with y
r
(0) at designer’s disposal; [y
r
,
y
r
,
y
r
]
T
belongs
to a known compact set for all t ≥ 0.
A4. The unknown time-varying state delays 𝜏
i
(t), i =
1, ···, n, satisfy the following inequalities
𝜏
i
(t) ≤ 𝜏
max
< 1. (5)
Remark 1. Assumption A1 is the same as that in [10,30],
which implies that the smooth functions g
i
(⋅), i =
1, ···, n, are strictly either positive or negative and it is
the controllable condition of system (1). Assumption A1
relaxes the assumption in [8,22], in which it was assumed
that 𝜑
i,j
(⋅) are known. Assumptions A2–A4 are common
in the dynamic surface control method.
2.2 Backlash-like hysteresis model
In this paper, the backlash-like hysteresis nonlinear-
ity is described by the following differential equation [5]:
dw
dt
= 𝛼
dv
dt
(𝜆v − w)+𝜓
dv
dt
, (6)
where 𝛼, 𝜆(> 0) and 𝜓 are unknown constant parameters
with 𝜆>𝜓. The solution of (6) is
w = 𝜆v + d(v) (7)
with
d(v)=(w
0
− 𝜆v
0
) exp[−𝛼(v − v
0
)sgn(
v)]
+exp(−𝛼vsgn(
v))
∫
v
v
0
(𝜓 −𝜆) exp[𝛼𝜉sgn(
v)]d𝜉,
(8)
where v
0
= v(t
0
) and w
0
= w(v
0
). It can be proved that
d(v) is bounded for any v ∈ R; furthermore,
lim
v→−∞
d(v)= lim
v→−∞
[w(v; v
0
, w
0
)−𝜆v]=(𝜆 − 𝜓)∕𝛼, (9)
lim
v→+∞
d(v)= lim
v→+∞
[w(v; v
0
, w
0
)−𝜆v]=−(𝜆 − 𝜓)∕𝛼.
(10)
That is, 𝛼 determines the rate at which w switches between
−(𝜆 − 𝜓)∕𝛼 and (𝜆 − 𝜓)∕𝛼: The larger the parameter 𝛼
is, the faster the transition frequency in w is going to be
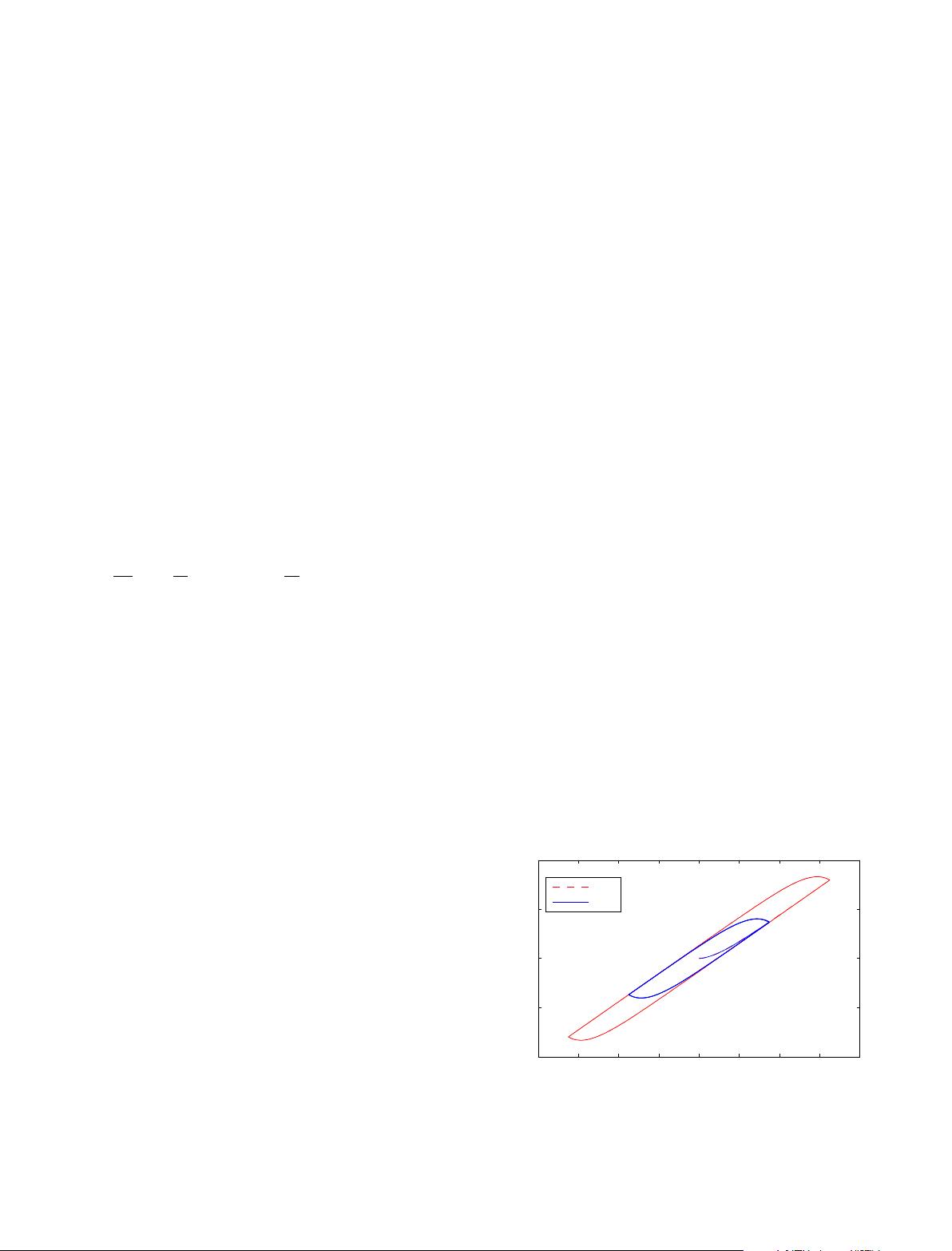
[5]. Fig. 1 illustrates the class of backlash-like hysteresis
described by (6).
Now, taking (7) into consideration, (1) can be
rewritten as
x
i
=g
i
(
x
i
)x
i+1
+f
i
(
x
i
)+h
i
(
x
i𝜏
)+d
i
(t), i =1, ···, n−1,
x
n
=𝛽v + g
n
(
x
n
)d(v)+f
n
(
x
n
)+h
n
(
x
n𝜏
)+d
n
(t),
y= x
1
,
(11)
where
𝛽 = g
n
(⋅)𝜆, 𝛽>0, (12)
and d(v) is a bounded hysteresis term satisfying
d(v)
≤D, (13)
with D being a positive unknown constant.
A5. The signs of g
i
(
x
i
), i = 1, ···, n, are known. With-
out loss of generality, it is assumed that g
i
(
x
i
) > 0
and there exist two constants g
min
and g
max
satisfy-
ing 0 < g
min
≤
g
i
≤ g
max
.Also,thereexiststhe
constants 𝛽
min
, 𝛽
max
,andD
𝜆 max
, such that 𝛽
min
≤
𝛽(⋅) ≤𝛽
max
and D∕𝜆 ≤ D
𝜆 max
.
Remark 2. Due to 𝜆 being an unknown positive con-
stant, Assumption A5 is reasonable. Also, we emphasize
that g
min
, g
max
, 𝛽
min
, 𝛽
max
and D
𝜆 max
are not required in
implementation of the proposed control design. They are
used for analysis only.
2.3 Radial basis function neural network
(RBFNN) approximation
In this paper, the RBFNN is employed to approx-
imate a continuous function on a given compact set.
−8 −6 −4 −2 0 2 4 6 8
−10
−5
0
5
10
Hysteresis input v(t)
Hysteresis output w(t)
k=6.5
k=3.5
Fig. 1. Hysteresis curves given by (7), where the parameters
𝛼 = 1,𝜆 = 1.432,𝜓 = 0.105, and the input v(t)=k sin
(2.3t)
with k = 3.5 and k = 6.5, respectively.
© 2015 Chinese Automatic Control Society and Wiley Publishing Asia Pty Ltd
剩余14页未读,继续阅读
1105 浏览量
641 浏览量
145 浏览量
196 浏览量
2021-06-12 上传
2021-03-04 上传
2021-05-13 上传
2021-03-13 上传
2021-06-16 上传

weixin_38704870
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Struts入门教程:从配置到实战
- Linux操作系统常用命令详解
- Struts入门:构建helloapp应用详解
- JavaMail API入门教程:发送与接收邮件
- Boson NetSim教程:静态路由与缺省路由配置实战
- BosonNetSim教程:Cisco设备模拟与实验环境搭建
- MATLAB图像处理命令概览:从applylut到bweuler
- O'Reilly《C#编程(第2版)》:入门与.NET框架详解
- Delphi单元测试工具DUnit详解与配置
- 创建JSP彩色验证码图像的方法
- WinSock网络编程:TCP/IP接口与应用
- 清华大学出版社《JAVA语言入门》
- C++/C编程最佳实践指南
- Div+CSS布局全攻略:从入门到高级实战
- Java Socket编程基础教程
- 面向对象设计模式:复用与灵活性的关键
