C8051F120单片机实现CAN总线通信协议设计
77 浏览量
更新于2024-09-02
收藏 186KB PDF 举报
"基于CAN总线通信协议的设计与实现,利用C8051F120微控制器实现CAN协议的应用层扩展,以解决CAN V2.0标准数据传输限制问题,建立高效可靠的数据收发、管理和错误处理机制。"
在现代工业自动化和汽车电子系统中,CAN总线通信协议因其高效、可靠和灵活性而被广泛采用。CAN(Controller Area Network)总线是一种多主站的串行通信协议,最初由Bosch公司为汽车领域开发,但现在已经应用于各种领域,如楼宇自动化、医疗设备和航空航天等。
CAN总线通信协议基于ISO 11898标准,分为物理层、数据链路层和应用层。在标准CAN V2.0A中,每个数据帧最多可以携带8个字节的数据。然而,有些应用需要传输更大数据量,这就需要对应用层进行扩展来满足需求。本文中提到的设计,就是在C8051F120微控制器的背景下,提出了一个改进的CAN应用层协议,能够实现超过8字节的数据传输。
C8051F120是一款高性能的混合信号微控制器,集成了模拟电路和数字电路,适合于需要实时控制和通信的系统。该微控制器以其丰富的外设接口和高速运算能力,成为了实现CAN协议的理想选择。作者通过设计新的数据传输格式,克服了CAN V2.0A的8字节数据限制,使得大容量数据也能在CAN总线上高效地传输。
文章的实现部分,重点介绍了以下几点:
1. 数据传输格式设计:为了传输超过8字节的数据,作者设计了一种新的数据包结构,可能包括多个CAN帧,每个帧携带一部分数据,同时确保数据的完整性。
2. 可靠的收发机制:建立了一套机制来确保数据在CAN总线上的正确接收和发送,这可能包括错误检测、确认序列以及重传策略。
3. 管理机制:为了有效管理和跟踪不同数据包,可能引入了序列号、数据包标识符等机制,以便于数据的排序和重组。
4. 错误处理机制:当通信过程中出现错误时,如帧错误、位错误等,需要有相应的错误处理策略,确保系统的稳定运行。
5. 实时性考虑:由于CAN总线常用于实时系统,因此在设计中也考虑了数据传输的实时性,确保数据能在规定的时间内送达目的地。
通过这些机制的结合,该设计实现了在CAN总线上的高效、可靠的数据传输,提升了系统整体的通信性能。这种基于CAN总线通信协议的设计方法对于需要大量数据交换的嵌入式系统来说具有很高的实用价值,尤其是对于那些使用C8051F120或其他类似微控制器的系统而言。此外,该设计思路也可以为其他类似的通信协议提供参考,尤其是在面对数据量较大、实时性要求高的应用场景时。
基于基于CAN总线通信协议的设计与实现总线通信协议的设计与实现
The Design and Realization of Can Bus Communication protocol Based on C8051F120
Abstract:This paper proposed a CAN protocol of application layer based on CAN specification 2.0A with the
background of C8051F120 microcontroller. At first, has designed a data format in transfering, which can
transfer data more than 8 bytes based on CAN specification 2.0A and makes up for the shortage of CAN
protocol of application layer based on the data structure, and has established the reliable receiving and
dispatching mechanism, the management mechanism and the error processing mechanism and so on, which
maintains the protocol work smoothly and attains the convenient and prompt transmission through CAN bus.
Keyword: CAN;BUS; Communication Protocol; 8051F120
摘要:本文以C8051F120单片机为背景,在CAN V2.0技术规范的基础上提出了一种基于单片机的CAN应用层协
议。文中首先设计了一种数据传递格式,它解决了CAN V2.0规范只能传递小于8字节数据的缺点,实现了大于8
字节数据的准确传输。并在此基础上,建立了可靠的收发机制、管理机制和错误处理机制共同维护协议的运
转,实现了CAN总线数据方便快捷的传输。
关键词: CAN 总线 通信协议 C8051F120
1 前言
控制器局域网(CAN-Controller Area Network)属于现场总线(Fieldbus)的范畴,是众多的属于现场总线标
准之一,它适用于工业控制系统,具有通信速率高、可靠性强、连接方便、性能价格比高等诸多特点。它是一
种有效支持分布式控制或实时控制的串行通信网络,以其短报文帧及CSMA/CD-AMP(带有信息优先权及冲突
检测的载波监听多路访问)的MAC(媒介访问控制)方式而倍受工业自动化领域中设备互连的厚爱。CAN的应
用范围遍及从高速网络到低成本的多线路网络,它可以应用于汽车系统、机械、技术设备和工业自动化里几乎
任何类型的数据通信。CAN具有如一下优点:
1)使用简单方便。许多CAN控制器实现了CAN物理层及数据链路层的大部分功能,用户只须对CAN控制器进行
初始化和对CAN总线上的数据进行收发操作即可实现通信;
2)高可靠性。CAN上的最大通信速率可达1Mbps,CAN总线是多主节点,各节点通过总线仲裁获得总线控制
权。完善的错误处理机制保证了高噪声干扰环境下数据传送的安全可靠;
3)系统可扩展性能好。CAN总线是基于发送报文的编码,而不是对CAN控制节点进行编码,故增添或删除CAN
节点不会对系统造成太大的影响。
CAN总线以报文为单位进行信息传送,它支持4种不同类型的报文帧:数据帧、远程帧、超载帧和错误帧。报文
中包含信息标识符ID,它标志了报文的优先权。CAN总线上各个节点都可主动发送,总线上的报文采用标识符
ID进行仲裁,ID值越小,优先级越高。具有最高优先权报文的节点赢得总线使用权,而其它节点自动停比发
送。在总线再次空闲后,这些节点将自动重发原报文。网络中的所有节点都可由ID来自动决定是否接收该报
文。每个节点都有ID寄存器和屏蔽寄存器接收到的报文只有与该屏蔽的功能相同时,该节点才开始正式接收报
文,否则它将不理睬ID后面的报文。这使CAN系统非常灵活,可任意扩展或改变网络组成。
C8051F系列单片机是集成的混合信号片上系统SOC(System on chip),具有与MCS-51内核及指令集完全兼
容的微控制器,除具有标准8051的数字外设部件之外,片内还集成数据采集和控制系统中常用的模拟部件和其
它数字外设及功能部件。正是由于其体积小、集成度高、功能多、配置容易、使用方便等特点,已被广泛应用
于智能仪表、数据采集、自动化控制等领域。因此本文采用C8051F120设计与实现CAN总线通信协议,充分发
挥其体积小、可靠性高的特点。C8051F120是完全集成的混合信号片上系统MCU芯片,具有64个数字I/O引脚
(100脚TQFP封装)。
2 数据传输格式的制定
在CAN2.0规范中规定,每次收发最多只能传送8字节.这可以满足大多数工业领域中控制命令、工控状态和测试
数据的一般要求;但实际应用中,往往出现传送多于8字节的要求,此时应通过报文的拆卸和拼接技术予以实
现。本文在CAN2.0A的基础上,定义了简单的传输格式,完成了单帧数据和多帧数据准确快捷的传输。
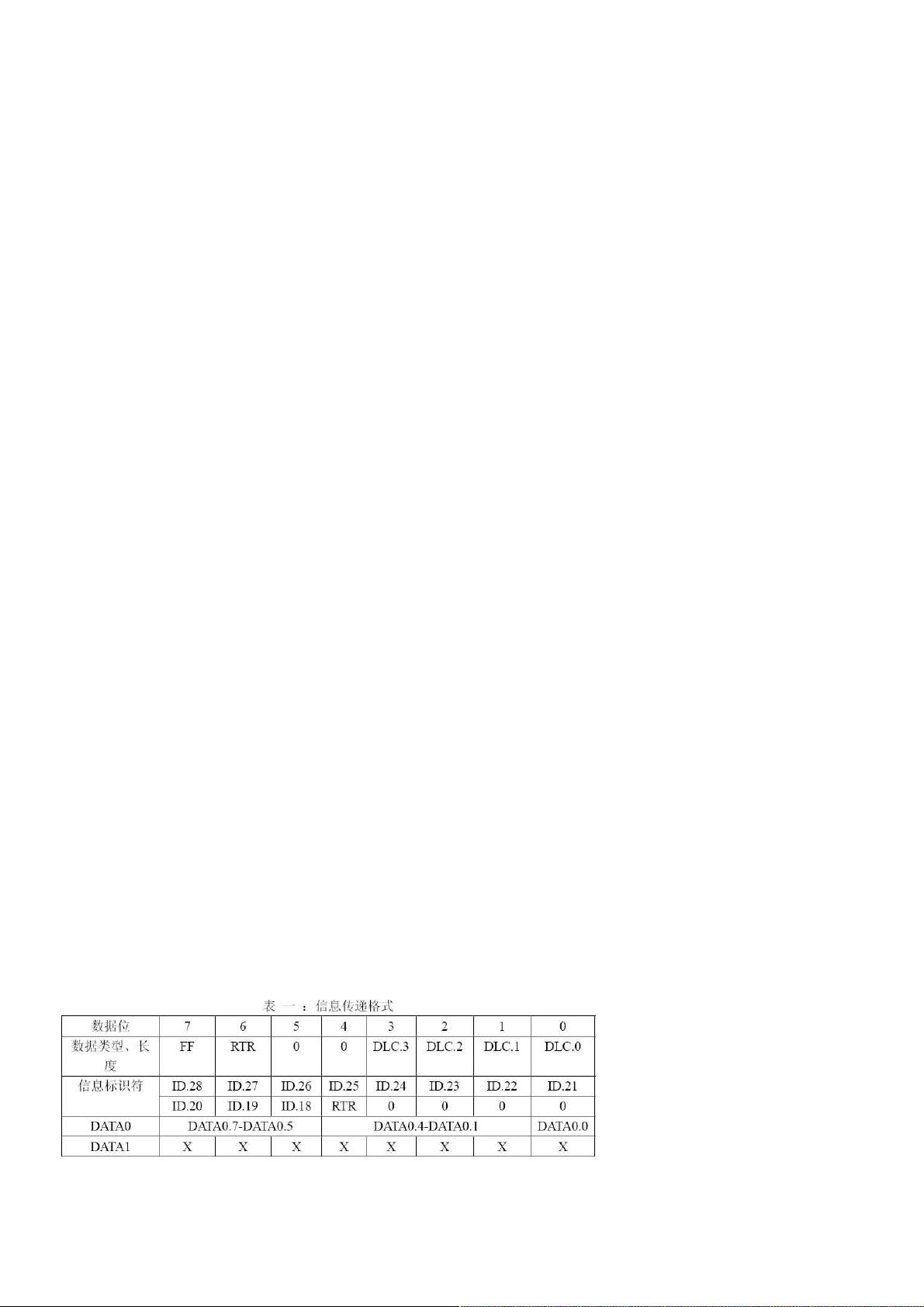
信息传递格式如表一所示:
其中,各位的含义如下:
FF:0表示为标准格式,1表示为扩展格式;
RTR:0表示为数据帧,1表示为远程帧;
DLC.X:数据长度代码位(0~8);
下载后可阅读完整内容,剩余3页未读,立即下载
2013-01-22 上传
2020-10-17 上传
2018-11-24 上传
2021-01-28 上传
2020-08-29 上传
2021-06-19 上传
2021-08-07 上传
点击了解资源详情
点击了解资源详情

weixin_38719635
- 粉丝: 3
- 资源: 971
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
