TMS320F2833x实现无传感器PMSM磁场定向控制的低成本方案
需积分: 19 118 浏览量
更新于2024-07-19
收藏 16.51MB PDF 举报
本应用报告详细探讨了如何利用德州仪器(TI)的C2000系列微控制器TMS320F2833x实现三相永磁同步电机(PMSM)的无传感器磁场定向控制。该微控制器因其高性能和成本效益而被选中作为电机控制器,特别适用于需要精确控制和高效能的应用。
首先,报告介绍了磁场定向电机控制的基本原理,它是一种数字矢量控制方法,能在宽速度范围内提供高效的性能。在没有传统传感器(如相位电流传感器)的情况下,通过结合磁场观察器,实现了速度无传感器控制,从而简化了系统设计并降低了成本。
在技术实现上,TMS320F2833x的32位处理能力以及IQ数学库的支持,使得浮点运算的精确度得以保证,这对于执行复杂的FOC算法至关重要。该微控制器的优势在于其模块化的软件设计,可以从基础的硬件配置(如HVDCMCR1.1套件)开始,逐步构建递增的系统架构,确保控制的灵活性和可靠性。
报告详细描述了以下几个关键部分:
1. 概述:给出了整个项目的背景,解释为何选择TMS320F2833x以及它在电机控制中的角色。
2. 永磁电机介绍:介绍了永磁同步电机的工作原理,包括定子和转子的交互作用。
3. 同步电机运行:阐述了电机如何通过电磁感应产生扭矩,推动转子旋转。
4. 磁场定向控制(FOC):深入讲解了FOC算法的核心概念,强调其在电机控制中的重要性。
5. FOC系统配置:展示了如何配置基本的FOC系统结构,包括信号处理和控制策略。
6. C2000控制器的优势:突出了TMS320F2833x在数字电机控制中的优势,如处理能力和代码兼容性。
7. 文献与DMC库:引用了相关的TI资源和工具,如Code Composer Studio,用于微控制器的编程和调试。
8. 硬件配置:详细说明了实验平台的硬件设置,包括电路板和接口。
9. 系统构建过程:逐步指导如何通过递增的方式搭建和测试电机控制系统。
10. 参考文献:提供了进一步研究和深入了解的学术参考资料。
图示部分展示了关键概念和步骤,帮助读者更好地理解电机控制的工作流程和原理。通过这份报告,读者可以学习到如何有效地利用TMS320F2833x在实际项目中实施无传感器磁场定向控制,提高电机系统的性能和效率。
q
PI
PI
SV
PWM
V
DC
V
S refa
V
S refb
3-phase
Inverter
a b,
a b,
d,q
a,b
Clarke Tr.
Park Tr.
AC
Motor
V
Sqref
V
Sdref
Inv. Park Tr.
i
Sq
i
Sd
i
Sa
i
Sb
i
b
i
a
i
Sdref
i
Sqref
d,q
a b,
q
FOC
的基本系统配置
5 FOC 的的基基本本系系统统配配置置
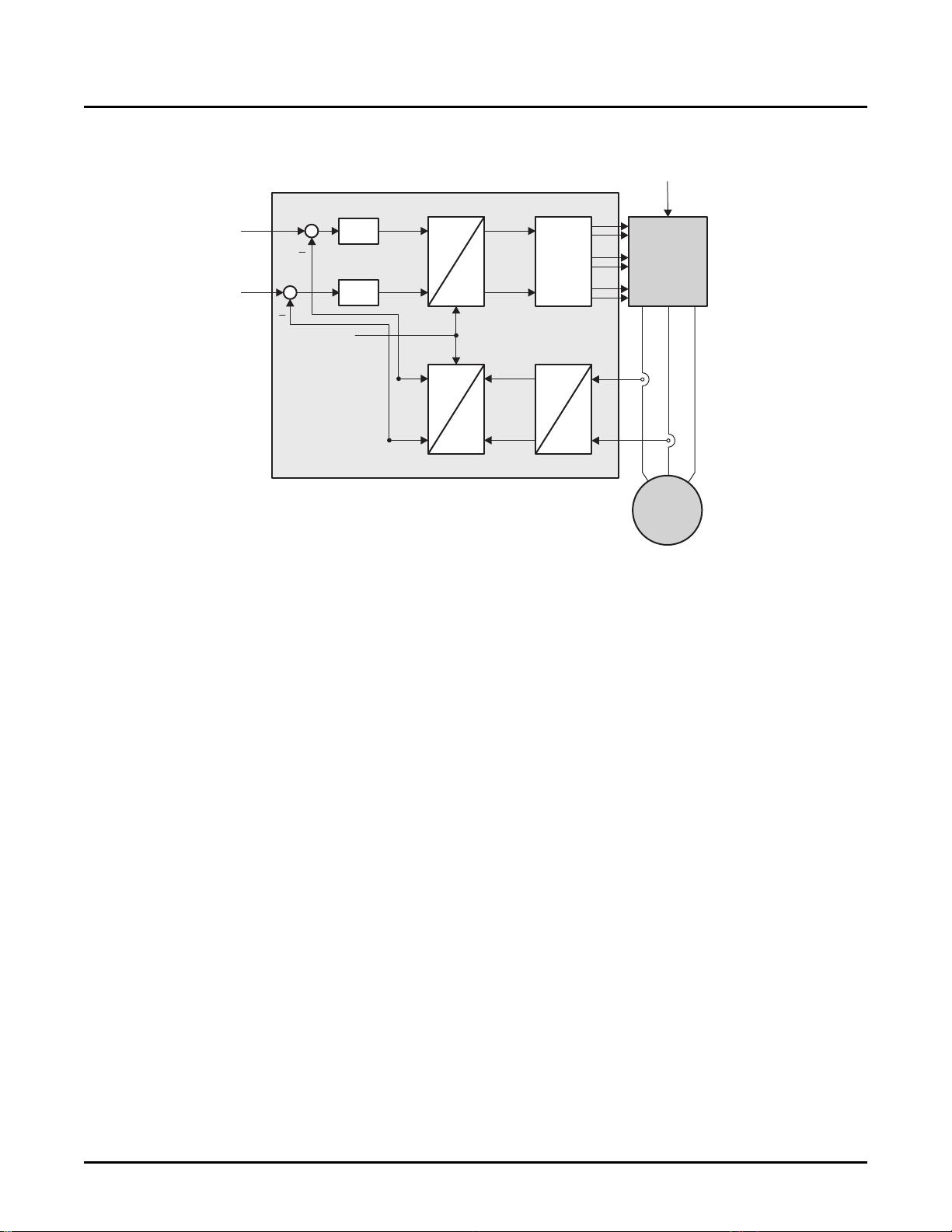
图 7总结了用 FOC 进行转矩控制的基本系统配置。
图图 7. 针针对对交交流流电电机机的的 FOC 基基本本系系统统配配置置
测量了两个电机相位电流。 这些测量值馈入 Clarke 变换模块。 这个设计的输出被指定为 i
sα
和 i
sβ
。 电流的
这两个分量是 Park 变换的输入,它们提供了 d,q 旋转基准框架内的电流。 i
sd
和
isq
分量与基准 i
sdref
(磁通基
准)和 i
sqref
(转矩基准)相比较。 在这一点上,这个控制结构显示了一个有意思的优势:它可被用来通过简
单地改变磁通基准并获得转子磁通位置来控制同步或 HVPM 机器。 与同步永磁电机中一样,转子磁通是固
定的,并由磁体确定;所以无需产生转子磁通。 因此,当控制一个 PMSM 时,i
sdref
应被设定为 0。 由于
HVPM 电机的运转需要生成一个转子磁通,磁通基准一定不能为零。 这很方便地解决了“经典”控制结构的一
个主要缺陷:异步至同步驱动的可移植性。 当您使用和一个速度 FOC 时,转矩命令 i
sqref
可以是速度调节器
的输出。 电流调节器的输出是 V
sdref
和 V
sqref
;它们被应用于反相器 Park 变换。 这个设计的输出是 V
sαref
和
V
sβref
,它们是 (α
,
β) 静止正交基准框架内的定子矢量电压分量。 这些是空间矢量脉宽调制 (PWM) 的输
入。 这个块的输出是驱动此反相器的信号。 请注意,Park 和反相器 Park 变换需要转子磁通位置。 这个转
子磁通位置的获得由 AC 机器的类型(同步或异步机器)而定。 5.1 节中讨论了转子磁通位置注意事项。
5.1
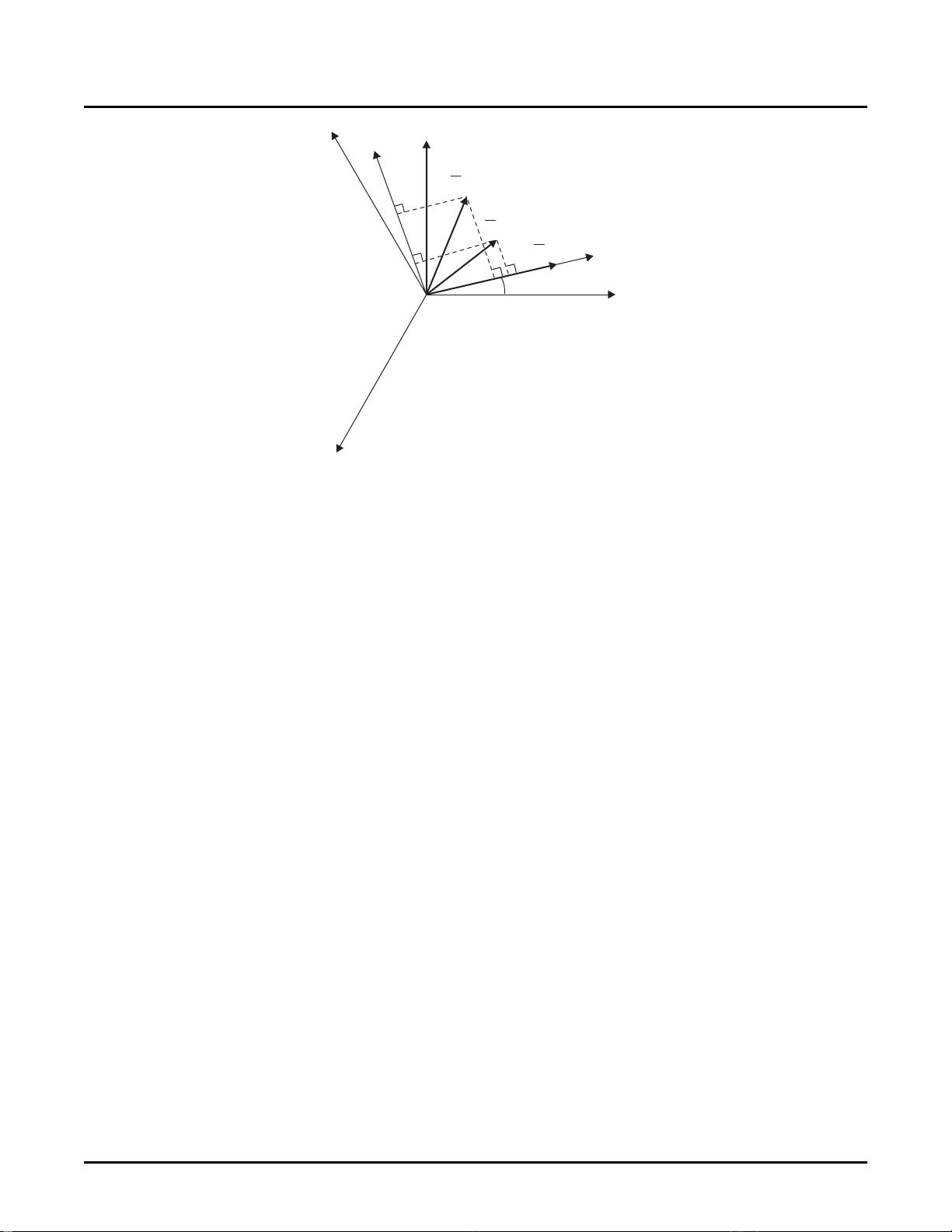
转转子子磁磁通通位位置置
转子磁通位置的知识是 FOC 的核心。 事实上,如果这个变量中有一个错误,转子磁通未与 d 坐标轴对齐,
而 i
sd
和 i
sq
是定子电流的不正确磁通和转矩分量。图 8显示了 (a,b ,c), (α
,
β) 和 (d
,
q) 基准框架,转子
磁通的正确位置,定子电流和定子电压空间矢量,它们随着 d,q 基准以同步速度旋转。
8
剩余40页未读,继续阅读
149 浏览量
1521 浏览量
1911 浏览量
2023-08-25 上传
2024-09-06 上传
135 浏览量
726 浏览量
326 浏览量
2018-11-16 上传

mapil
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- DEV自定义控件,多按钮用户控件。包含新增,修改,删除,保存等
- Generative_CA:该项目包含使用生成模型继续验证来自H-MOG日期集的运动传感器数据的实现
- restafari,.zip
- Office补丁解决“由于控件不能创建,不能退出设计模式”
- 直流电机PID学习套件1.0,c语言词法分析生成器源码,c语言
- 设计世界
- 单片机防火防盗防漏水仿真protues
- Milestone_three
- matrixmultiplication:c中两个矩阵的乘法
- 易语言窗体设计原代码
- AVL-Tree,c语言游戏源码及素材,c语言
- IOS应用源码之【应用】Skin or Blob Detection(皮肤检测).rar
- openWMail:社区运行wmail的分支-https:github.comThomas101wmail
- basysr:文件pertama
- geomajas-client-common-gwt-command-2.0.0.zip
- DxAutoInstaller-souce.zip
