MATLAB仿真:三环位置随动系统设计与动态特性分析
137 浏览量
更新于2024-06-23
1
收藏 2.36MB DOC 举报
位置随动系统MATLAB计算及仿真说明书是对位置随动系统深入研究的重要文档,该系统是一种典型的反馈闭环控制系统,在机电一体化领域中扮演着关键角色。随着科技的进步,位置随动系统被广泛应用于现代工业、国防和高科技领域,例如电力拖动自动控制系统中的重要分支。
设计的核心目标是基于经典三环结构的模拟式位置随动系统,特别针对大功率系统,其特点是能够精确追踪随机变化的给定量,强调稳态精度和动态跟随性能。在控制策略上,电流环和转速环采用PI调节器,位置环则采用PID调节器配合典型II型系统设计,以提高系统稳定性并减少系统误差。
MATLAB在这个过程中扮演了核心角色。作为一种强大的数学计算和图形化工具,MATLAB在动态系统仿真方面具有显著优势,它的仿真工具因其功能强大、易用性高而受到青睐。通过MATLAB,研究人员可以设计、分析和优化系统的性能,确保输出响应的高精度和快速性,尤其是在处理动态性能挑战时,如抗扰能力和快速跟随能力。
第一章详述了位置随动系统的基础概念,定义了其作为伺服系统的主要功能——精确跟踪输入信号,确保执行机构按照位置指令行动。通过MATLAB的仿真功能,可以将理论设计转化为直观的动态模型,验证系统性能,优化控制器参数,并在实际运行前预测可能遇到的问题。
总结来说,这份说明书涵盖了位置随动系统的设计原理、控制策略选择、MATLAB在仿真中的应用以及系统性能的评估方法。理解并掌握这些内容对于深入研究和实践位置随动系统具有重要意义。
内蒙古工业大学本科毕业设计说明书
10
)(
)(
)(
1
11
1
sDs
sNK
sW
p
�
,
)(
)(
)(
2
22
2
sDs
sNK
sW
q
�
式中
p
和
q
为
)(
1
sW
,
)(
2
sW
中所含积分环节的数目;
)(
1
sN
,
)(
2
sN
,
)(
1
sD
,
)(
2
sD
均为单位项为1的
s
多项式;
1
K
,
2
K
分别为
)(
1
sW
,
)(
2
sW
的增益 ,且令
KKK �
21
。
当
s
趋近于0时,各项多项式均趋近于1,则给定误差和扰动误差的表达式可以改写成
K
ss
e
m
qp
s
sr
)(
lim
*1
0
�
��
�
�
(1-7)
1
1
0
)(
lim
K
sFs
e
p
s
sf
�
�
�
(1-8)
式(1-7)和式(1-8)表明:1)给定误差
sr
e
与系统的开环增益
K
和前项通道中所有
积分环节的总数
qp �
有关;2)扰动误差
sf
e
则只与扰动作用点以前部分的增益
1
K
及
其积分环节数目
P
有关。
在自动控制原理中,根据系统开环传递函数中的积分环节的数目,对于
0�� QP
,
1,2,3…等不同数值分别称作0型、I型、II型、…系统,因此,系统误差就决定于这
样定义的系统类型。对于位置随动系统来说,由于转角是转速对时间的积分,控制对
象中的最后一个环节一定是积分环节,所以
0�� qp
, 不可能出现0型系统。而III型
和III型以上的系统是很难稳定的,因此,通常多用I型和II型系统。但是,
sr
e
和
sf
e
最
终为何值还要看
)(
*
s
m
�
和
)(sF
所含
s
的阶次,也就是说,还取决于给定和扰动输入信
号的类型。
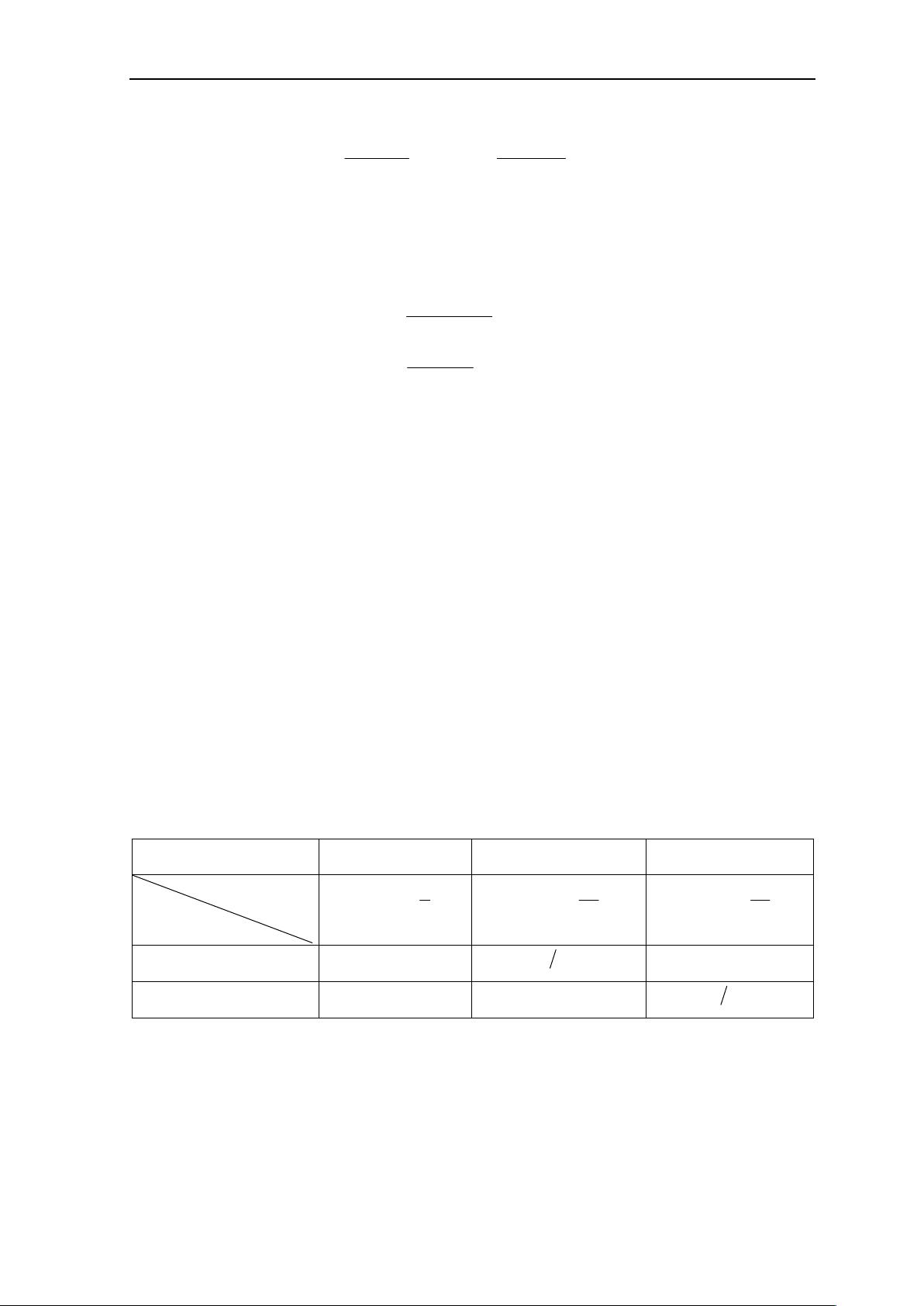
位置随动系统的典型给定输入信号有以下三种类型,位置阶跃输入、速度输入、
加速度输入。我们把它们的给定稳态误差一起列于表1-2中。
表1-2 给定稳态误差
sr
e
输入信号
单位阶跃输入
单位速度输入
单位加速度输入
给定误差
系统类型
s
s
m
1
)(
*
�
�
2
*
1
)(
s
s
m
�
�
3
*
1
)(
s
s
m
�
�
I型系统
0
K1
�
II型系统
0
0
K1
表1-2给定误差的物理意义是,I型位置随动系统只有转速到位移之间的一个积分
环节。在位置阶跃输入下,只要
0��
m
�
就有控制电压,电机就要转动,由于负载等
扰动的影响已计入扰动误差,现在不考虑任何扰动,电机将一直转到偏差电压等于零
时为止,因此稳态的给定误差为零。如果是速度输入,给定位置信号
*
m
�
不断增长,
要实现准确跟踪,输出轴必须与输入轴同步旋转,因此电机电枢两端必须有一定数值

剩余54页未读,继续阅读
1589 浏览量
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传

智慧安全方案
- 粉丝: 3847
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机开发与典型应用设计
- Wrox.Professional.Visual.Studio.Extensibility.Mar.2008
- SQL*Loader学习资料
- IBM 掌握Ajax系列
- strutsbook
- 精通JAVA——sping面向对象轻量级架构
- 电脑知识初级篇电子书
- Algorithms.for.Programmers - ideas.and.source.code.Draft.Oct.2008
- linux配置Java开发
- Manning.Hibernate.Search.In.Action.Dec.2008
- Java 2 高级程序设计百事通
- Struts in Action 中文修正版.pdf
- 谭浩强 c语言程序设计
- 2008上半年网络管理员上午试题
- 数据库开发新版电子书_A Developer's Guide to Data Modeling for SQL Server
- 华为的编程规范和范例
