异步电动机矢量控制MATLAB仿真研究
需积分: 10 168 浏览量
更新于2024-07-22
收藏 704KB DOC 举报
"异步电动机矢量控制MATLAB仿真"
在电机控制领域,异步电动机因其结构简单、运行可靠而广泛应用。然而,由于其复杂的动态特性,控制起来具有一定的挑战。MATALAB(MATLAB)作为一种强大的数学计算和仿真软件,常被用于电机控制系统的建模和分析。本实验主要探讨的是异步电动机的矢量控制方法,并通过MATLAB进行仿真实现。
1. 异步电动机矢量控制原理
矢量控制的核心思想是模拟直流电动机的控制行为,通过坐标变换将异步电动机的三相定子电流转化为在同步旋转坐标系下的直流等效电流。这样,可以分别独立地控制磁通和转矩,实现电机性能的优化。在矢量控制中,首先进行坐标变换,将三相交流电流转换为两相静止坐标系的交流电流,接着再通过旋转变换得到同步旋转坐标系下的直流电流,以此实现解耦控制。
2. 坐标变换
- 基本思路:通过坐标变换将三相交流电流转化为易于控制的直流电流形式。
- 三相——两相坐标系变换(3/2变换):将三相电流iA、iB、iC转换为两相静止坐标isα、isβ。
- 旋转变换:将静止坐标系的电流进一步转换到与转子磁链同步的旋转坐标系。
3. 转子磁链计算
转子磁链的准确计算是矢量控制的关键,它涉及到电机的电磁特性分析。
4. 矢量控制系统设计
- 电流闭环控制方式:通过对电流的精确控制,实现对电机磁通和转矩的解耦。
- MATLAB系统仿真系统设计:利用MATLAB的Simulink工具箱构建电机控制系统的仿真模型。
- PI调节器设计:采用比例积分控制器以稳定系统并提高动态响应。
5. 仿真结果
- 电机定子侧电流仿真:展示电流控制的稳定性和动态响应。
- 电机输出转矩仿真:验证控制策略对转矩产生的影响。
- 电机的转子速度及转子磁链仿真:反映电机内部状态的演变和控制效果。
6. 心得体会与参考文献
实验者通过MATLAB仿真实验深入理解了异步电动机矢量控制的理论与实践,同时也积累了宝贵的工程经验。
本实验通过MATLAB的仿真实现,揭示了异步电动机矢量控制的内在机制,证明了该方法能够有效地提升交流电机的控制性能,使其接近直流电机的控制效果。这一仿真过程不仅有助于理论学习,也为实际电机控制系统的开发提供了有力的工具和支持。
武汉理工大学《运动控制系统》课程设计说明书
异步电机矢量控制Matlab仿真实验
1 异步电动机矢量控制原理
矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三
相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加
以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。所谓矢量控制,就
是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标
系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量
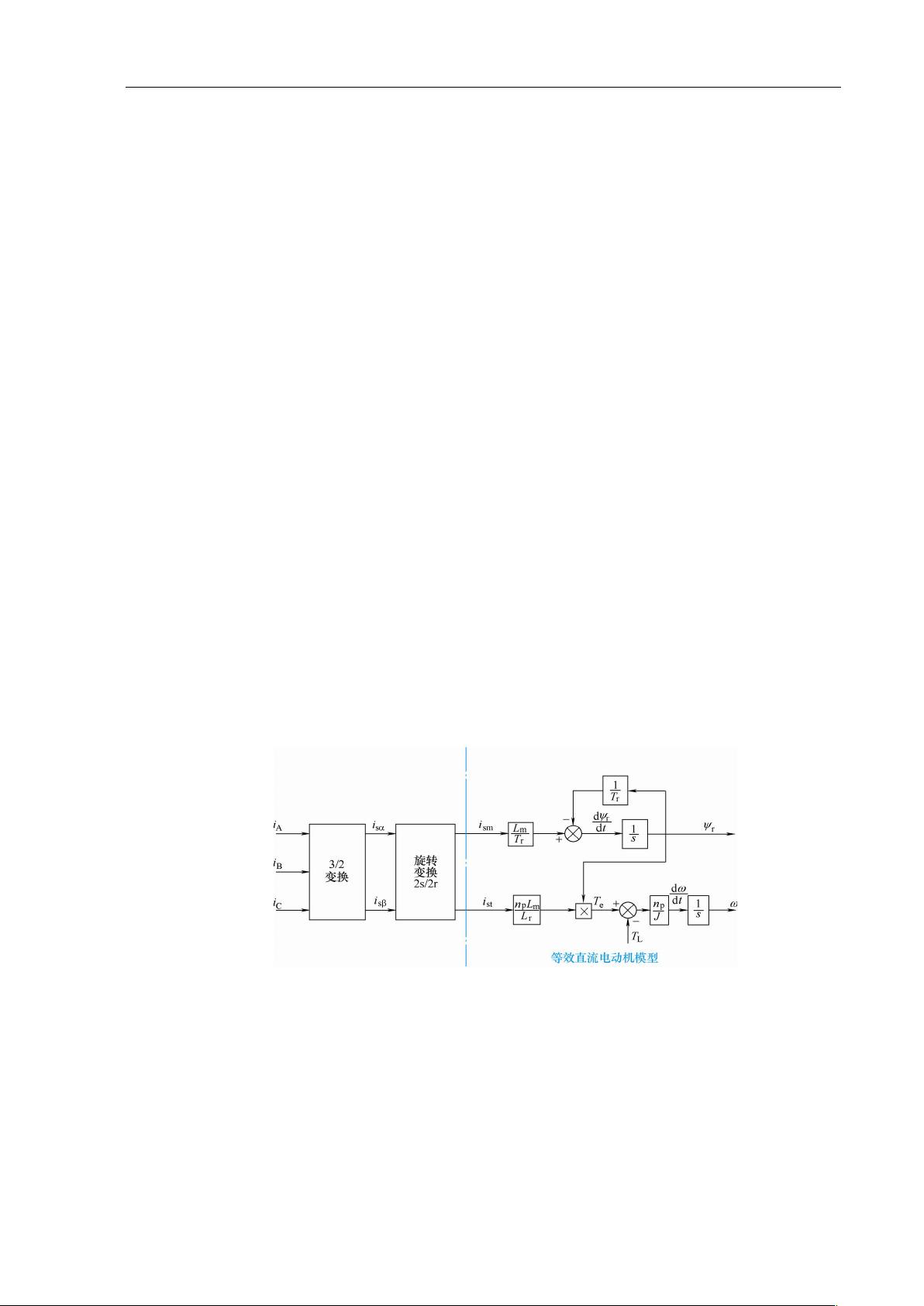
经变换得到三相坐标系的对应量,以实施控制。其中等效的直流电动机模型如图1-1所示
在三相坐标系上的定子交流电流i
A
、i
B
、i
C
,通过3/2变换可以等效成两相静止正交坐标
系上的交流i
sα
和i
sβ
,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系
上的直流电流i
sm
和i
st
。
图1-1 异步电动机矢量变换及等效直流电动机模型
从图1-1的输入输出端口看进去,输入为A、B、C三相电流,输出为转速ω,是一台
异步电动机。从内部看,经过3/2变换和旋转变换2s/2r,变成一台以i
sm
和i
st
为输入、ω为输
出的直流电动机。m绕组相当于直流电动机的励磁绕组,i
sm
相当于励磁电流,t绕组相当
于电枢绕组,i
st
相当于与转矩成正比的电枢电流。
按转子磁链定向仅仅实现了定子电流两个分量的解耦,电流的微分方程中仍存在非
1
剩余14页未读,继续阅读
1766 浏览量
445 浏览量
2022-07-15 上传
2024-11-11 上传

w8110212088
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言端口扫描器源码.zip
- 嵌入式,单片机开发外部中断实验.zip
- javaweb考试系统项目,课程设计
- freddidath-frontend
- RemoteDesktopOrganizer
- Wear OS ADB工具箱 V2.2.0.zip
- quill-minimal-example:使用Quill和ngx-quill的极简主义示例
- 每日新闻饲料
- SODsurvey:深度学习时代的显着对象检测
- sada_tcc_hibernate
- posthtml-inline:通过CLI或PostHTML内联资产
- 信息系统的发展和对未来的影响
- 电子设备行业数据解读:2019年三季报分析:业绩逐步回暖,关注具备增长空间板块.zip
- PlayerBar:在热线下方的栏上显示TPS和Ping
- laravel-shared-data:to一种将数据从后端共享到JavaScript的简便方法
- 蜂
