深度学习物体位姿估计:DenseFusion网络详解
需积分: 10 104 浏览量
更新于2024-07-16
1
收藏 1.62MB PDF 举报
DenseFusion是一份关于利用深度学习技术进行物体位姿估计的论文,由环境与过程技术部门的송명하(Song Minha)和KIST(韩国科学技术院)的Center for Robotics Research团队共同开发。该研究专注于构建一个高效且准确的3D目标识别系统,尤其适用于具有挑战性的场景,如SymmetricObject数据集中的碗、木块、大钳子等对象。
论文的核心在于详细介绍DenseFusion的网络架构。首先,作者们使用RGB(彩色图像)、Depth(深度图像)和Label(语义分割标签)作为输入,其中Label来自PoseCNN的结果,用于去除背景并增强数据多样性。他们通过以下步骤处理这些数据:
1. 利用PoseCNN得到的对象边界框坐标,对RGB图像和深度图进行裁剪,只保留与目标物体相关的部分。
2. 对裁剪后的深度图进行处理,非零值被赋予权重,这一步确保了只关注物体区域。
3. 从深度图中随机选择1000个非零值的位置,存储在变量choose中,以便后续操作。
4. 使用choose变量对深度图索引,同时创建一个相应的xmap和ymap,用于构建点云,这一步有助于三维空间中的定位。
5. 通过这种方法,DenseFusion能够整合多模态信息,形成精确的物体位姿估计,包括姿态矩阵(Pose),这是整个系统的关键组成部分。
值得注意的是,DenseFusion不仅关注单一的物体检测,而是通过深度学习方法融合多种输入信息,提高了物体定位的准确性和鲁棒性。这种技术对于机器人、自动化和计算机视觉等领域具有重要意义,因为它可以应用于工业检测、自动驾驶以及增强现实等应用场景。
此外,该研究还展示了如何有效地结合深度图像和语义信息,以减少背景干扰,并通过数据增强提高模型的泛化能力。通过这种方式,DenseFusion能够在复杂的环境中实现高效、精确的3D目标识别,为未来的研究和实际应用提供了有价值的技术基础。
Center for Robotics Research
DenseFusion
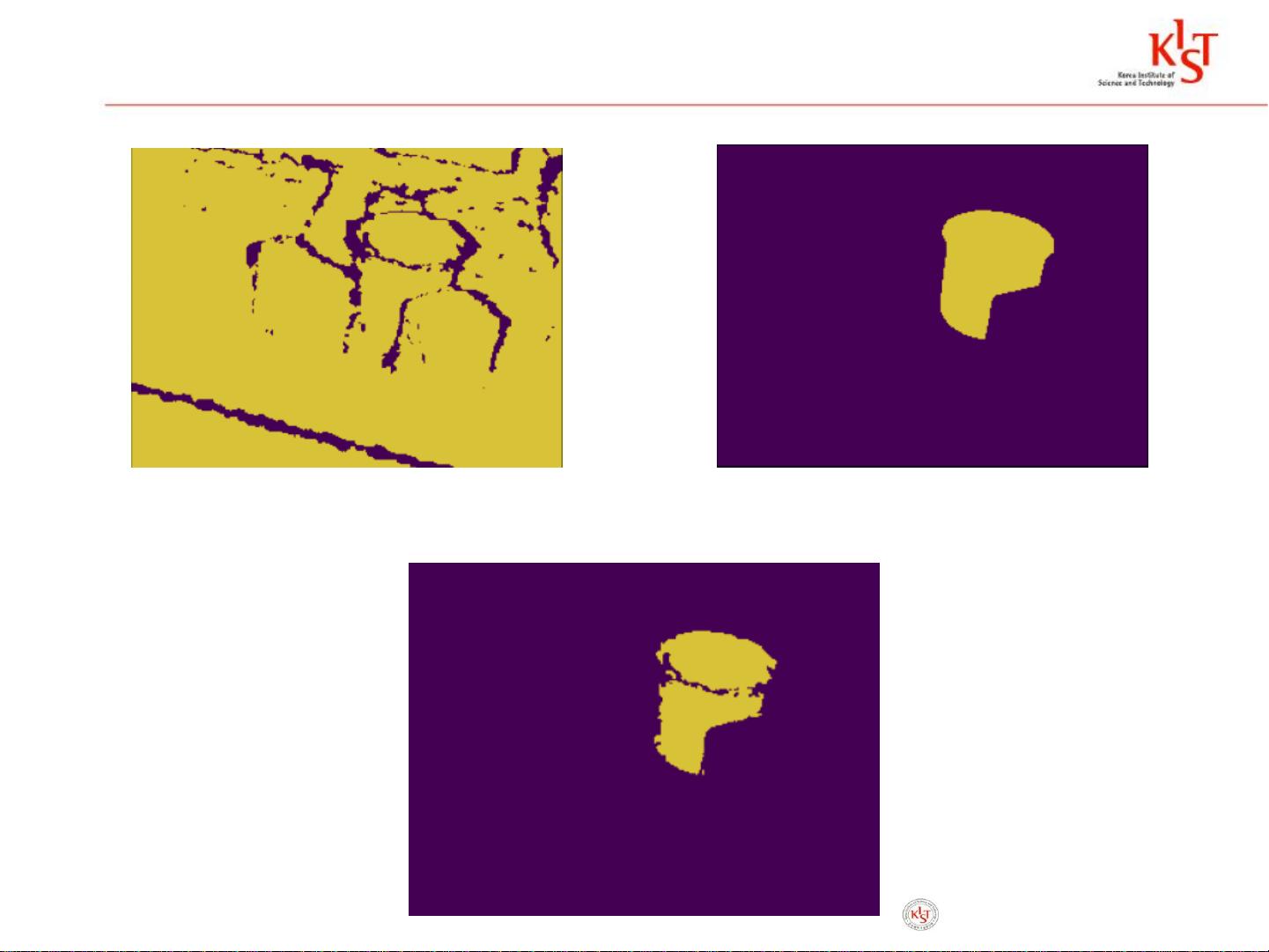
In the Depth image, only nonzero parts are made True and then multiplied by the semantic label
of the object. The result is shown in the image below
剩余22页未读,继续阅读
2020-08-23 上传
281 浏览量
2013-04-10 上传
2022-07-08 上传
2023-08-08 上传
2022-09-24 上传

Cooper__zhang
- 粉丝: 42
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
