单片机 PWM 舵机控制详解:实现精密角度调节
需积分: 9 62 浏览量
更新于2024-09-15
收藏 175KB PDF 举报
本文档主要探讨了如何利用单片机技术进行舵机控制,这是一种常见且实用的方法,尤其在机器人机电控制系统中起着关键作用。舵机作为一种位置伺服驱动器,能够精确地控制角度变化并保持稳定,其工作原理涉及到信号调制、比较以及电机驱动。控制信号通常采用PWM(脉宽调制)形式,通过改变占空比来调节舵机的位置。
在单片机实现舵机转角控制方面,虽然FPGA和模拟电路也有能力生成PWM信号,但由于成本高、电路复杂,不适合大多数应用。相比之下,单片机因其成本低、体积小和易于集成的优势被广泛采用。单片机能提供微秒级的脉宽精度,有助于提高舵机的转角控制精度,其数字信号处理特性使其对干扰的抵抗能力强,提高了系统的稳定性和可靠性。
在控制设计上,针对单个舵机的控制,通过调整单片机定时器的中断初值,实现20ms周期信号的分段中断,即一次短定时中断和一次长定时中断,这样简化了硬件需求,减少了软件复杂性,同时确保了高效的控制性能和高精度。
整个设计过程包括基本的PWM信号产生,即固定周期的20ms信号,以及脉宽调整,即通过软件算法控制PWM信号的占空比,以实现精确的舵机角度控制。这一技术对于无人机、机器人以及各种需要精细角度控制的应用场景来说,是一项必不可少的基础技能。通过学习和实践这种技术,开发者可以更好地掌握舵机控制的基本原理,并将其应用于实际项目中。
利用单片机 PWM 信号进行舵机控制 ( 图 )
基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加以 灵
活应用。
在机器人机电控制系统中, 舵机控制效果是性能的重要影响因素。 舵机可以在微机电系统和航模中作为基本 的
输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控
制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为 20ms
,
宽度为 1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的 正
负输出到电机驱动芯片决定电机的正反转。 当电机转速一定时,通过级联减速齿轮带动电位器旋转, 使得电 压
差为 0 ,电机停止转动。
图 1
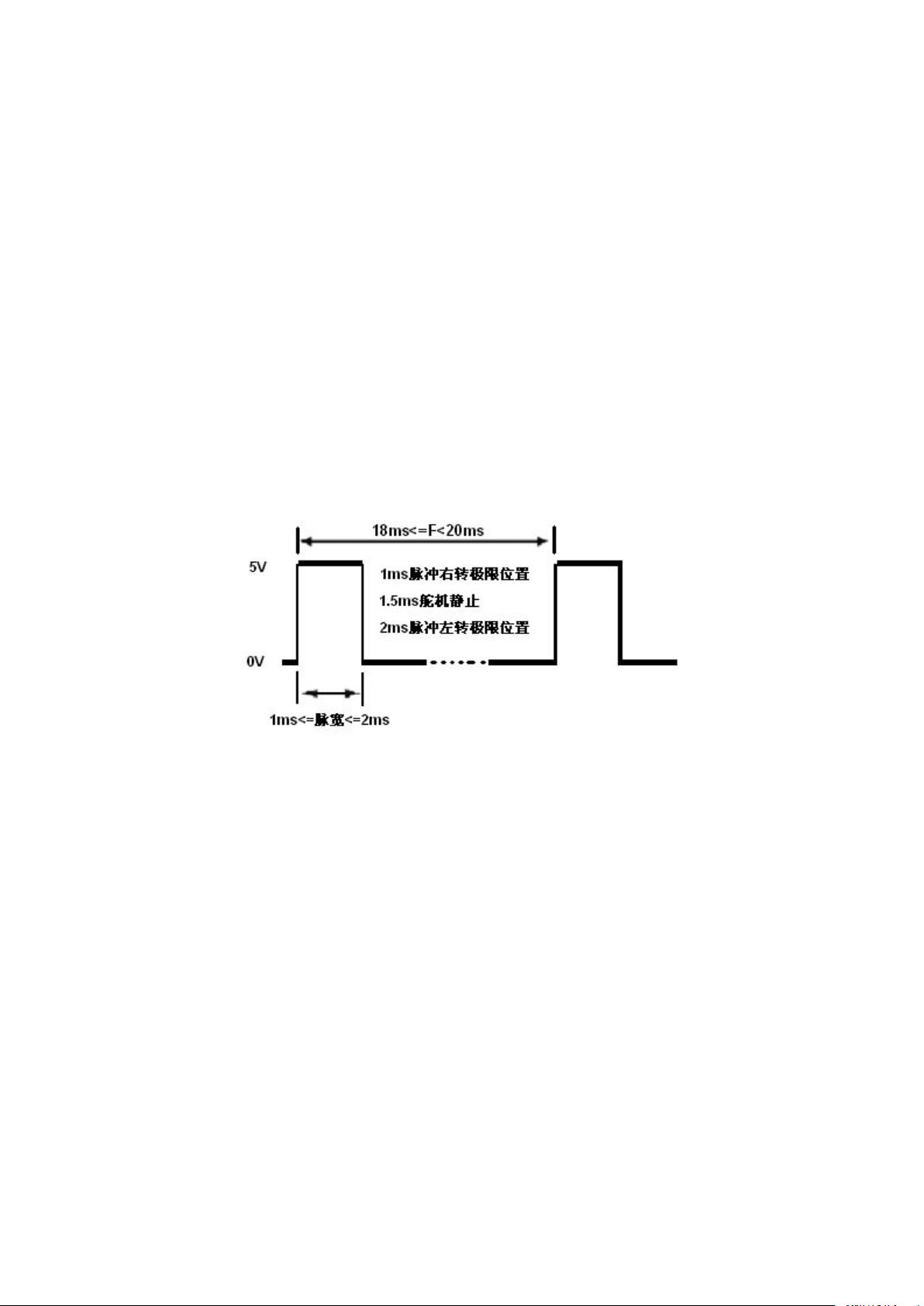
舵机的控制要求
舵机的控制信号是 PWM 信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图 1 所示。
单片机实现舵机转角控制
可以使用 FPGA 、模拟电路、单片机来产生舵机的控制信号,但 FPGA 成本高且电路复杂。对于脉宽调制信
号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要 50Hz ( 周期是 20ms) 的
信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。 5mV 以上的控制电压的变化就 会
引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于 5mV ,所以滤波电路的精 度
难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使 PWM 信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精
度。单片机完成控制算法,再将计算结果转化为 PWM 信号输出到舵机,由于单片机系统是一个数字系统,其 控
制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的 PWM 周期信号,本设
下载后可阅读完整内容,剩余4页未读,立即下载
1203 浏览量
1808 浏览量
279 浏览量
367 浏览量
117 浏览量
"基于FPGA的六自由度机械臂驱动控制与逆运动学解算技术,融合总线舵机控制与工程源码详解",基于FPGA的六自由度机械臂驱动控制技术:逆运动学解算与总线舵机控制工程实践的源码与技术文档解析,基于FPG
2025-02-12 上传
191 浏览量
657 浏览量

ruanpaigu
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
