"高效低噪灵活机动的仿生机器鱼:研究现状和应用实例"
需积分: 7 32 浏览量
更新于2024-01-03
收藏 2.81MB PPT 举报
生机器鱼是一种模仿海洋生物鱼类的游动方式和推进机理,研制成的水下机器人。随着海洋资源的开发和利用的日益加剧,水下机器人作为海洋勘测、海底探查、海洋救捞、海底管道检测以及水下侦查和跟踪等领域的重要工具,成为了人们关注的研究方向之一。传统的螺旋桨推进器水下机器人在推进过程中存在能量消耗大、推进效率低、噪音大等问题,而仿生机器鱼的研究则是基于海洋生物鱼类优秀的游动能力,希望通过模仿其游动推进模式,研制出高效低噪音、灵活机动的水下机器人,以应对水下复杂环境作业的需求。
目前的仿生机器鱼研究还处于初步阶段,但已经在理论和实验研究上取得了一定的进展。研究人员希望通过仿生机器鱼的研究,不仅可以提高水下机器人的推进效率和机动性,还可以降低水下作业过程中的噪音和对水生生物的干扰,从而更好地满足海洋资源开发和利用的需求。
在仿生机器鱼的研究中,首先需要明确其研究意义和应用领域。海洋中蕴藏着丰富的生物资源和矿产资源,而水下机器人作为海洋勘测、海底探查、海洋救捞、海底管道检测以及水下侦查和跟踪等工具,具有重要的应用价值。然而,传统的螺旋桨推进器水下机器人存在诸多问题,因此需要寻求新的推进机理和设计方案。仿生机器鱼作为一种新型的水下机器人设计理念,可以借鉴鱼类的游动方式和推进机理,以期获得更好的推进效果和操作性能,从而更好地满足海洋资源开发和利用的需求。
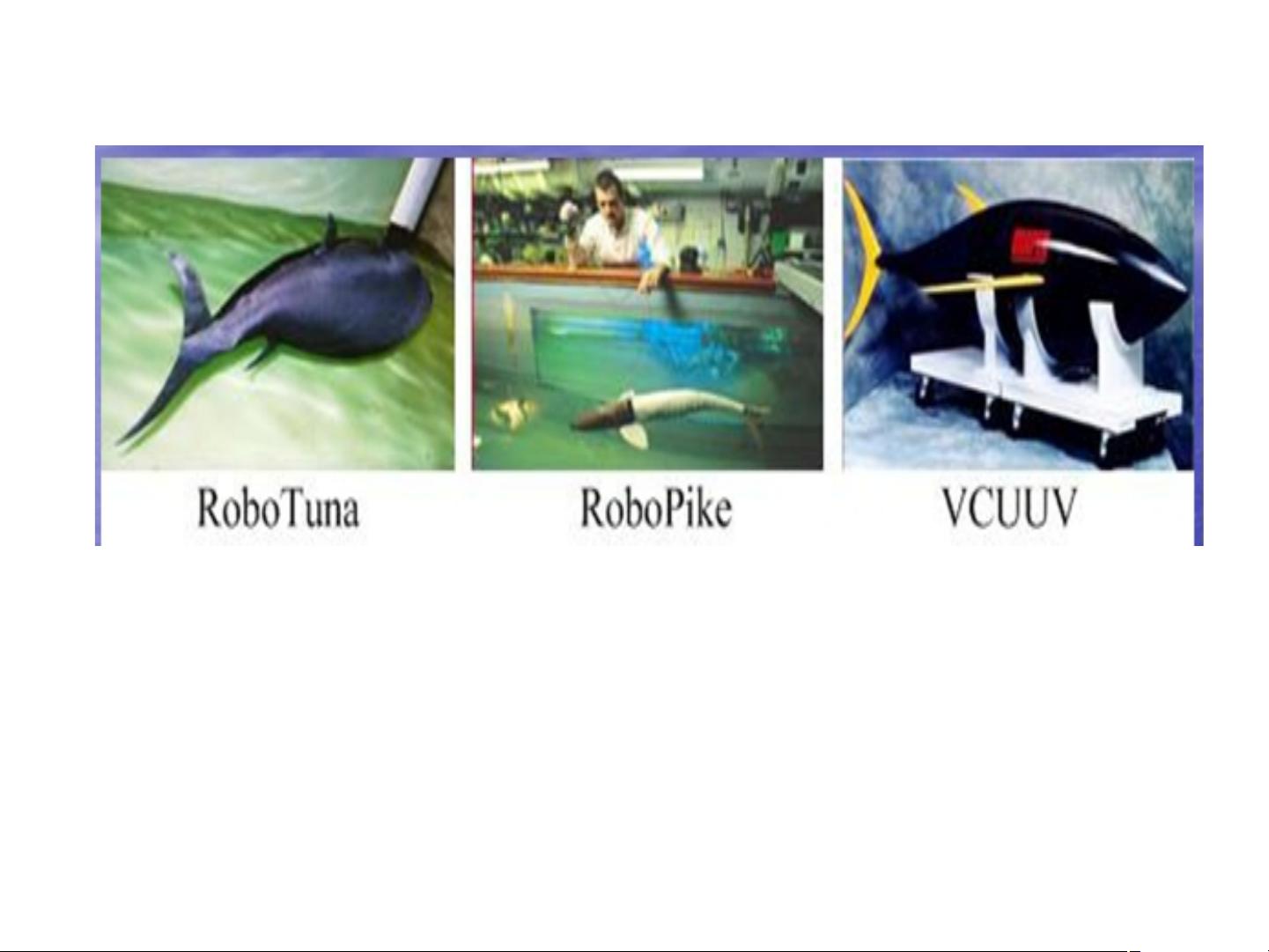
目前,仿生机器鱼的研究现状主要包括理论模型研究、仿生机器鱼模型和推进机理的设计以及实际应用案例等方面。在理论模型研究方面,研究人员通过对海洋生物鱼类的游动方式和推进机理进行观察和研究,建立了相应的仿生机器鱼数学模型,并通过数值模拟和实验验证等手段,验证了仿生机器鱼的设计理念和技术可行性。在仿生机器鱼模型和推进机理的设计方面,研究人员提出了各种各样的设计方案和技术方案,包括基于生物鱼类的形态结构设计、基于生物鱼类的运动学设计以及基于生物鱼类的推进机理设计等方面,以期能够更好地模仿生物鱼类的游动方式和推进机理。在实际应用案例方面,研究人员通过对仿生机器鱼的水下作业、海洋资源勘测和海底管道检测等实际应用场景的研究,验证了仿生机器鱼在海洋资源开发和利用中的应用潜力。
在研究中,研究人员需要满足一定的基本要求,包括对仿生机器鱼的设计理念和技术方案有深入的理解和认识,具备扎实的理论基础和实际操作能力,具备较强的创新精神和团队合作能力,以及有一定的海洋资源开发和利用背景和经验等。此外,还需要选择合适的模型获得途径和资料推荐,以期能够更好地进行仿生机器鱼的研究工作。
总的来说,仿生机器鱼的研究意义重大,具有广阔的应用前景和发展空间。在海洋资源开发和利用领域,仿生机器鱼作为一种新型的水下机器人设计理念和技术方案,可以有效提高水下机器人的推进效率和机动性,降低噪音和对水生生物的干扰,从而更好地满足海洋资源开发和利用的需求。虽然目前的仿生机器鱼研究还处于初步阶段,但已经取得了一定的进展,未来将会有更多的理论和实验研究工作,以推动仿生机器鱼技术的发展和应用。
仿生机器鱼研究现状
剩余30页未读,继续阅读
219 浏览量
点击了解资源详情
点击了解资源详情
2022-11-19 上传
2022-11-19 上传
353 浏览量
113 浏览量
2022-01-10 上传

猫一样的女子245
- 粉丝: 231
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- foobar167.github.io:有关FooBar167 GitHub的网站
- 极小值
- quokka-marketplace
- cadvisor.tar.gz
- macho-browser:Mac浏览器,用于Mach-O二进制文件(macOS,iOS,watchOS和tvOS)
- 易语言学习-工具加载支持库.zip
- Oedipus-开源
- zkSforce:可可库,用于调用Salesforce.com Web服务API
- Kaely:Página网站
- apache-ant-zip-2.3.jar.zip
- SuperRanker:清单计量协议
- PHP-电子商务-网站:该项目从数据库中获取产品,并将其显示在多个页面上。 产品页面将显示所有产品,然后用户将能够查看单个产品并将其添加到购物车
- 易语言学习-闪电易支持库 2.4#4.zip
- cooViewer:cooViewer-适用于Mac的简单漫画查看器
- DeCAPitated
- ProjectItalika:测试
