ABB机器人与S7-1200 PLC Socket通信:位置坐标数据交互实操指南
版权申诉
本文档详细介绍了如何通过Socket通信技术实现在ABB机器人与西门子S7-1200 PLC之间的位置坐标数据交换。首先,作者假设读者已经了解了基本的Socket通信设置和编程测试,这部分内容可以在提供的链接中找到。
在RobotStudio环境中,创建一个新的项目,编写RAPID程序。程序中涉及的关键步骤包括:
1. 声明必要的变量:这些变量用于存储机器人当前位置的数据,如关节轴角度和笛卡尔坐标系中的XYZ坐标。每个变量的用途都有明确的注释,确保正确理解其功能。
2. 定义子程序:一个是用于读取机器人当前位置的子程序,它实时获取并返回关节轴的角度和XYZ坐标。另一个是接收子程序,用于接收来自PLC的目标位置坐标,以便在HMI触摸屏上输入,方便远程操作。
3. Socket通信子程序:分别实现发送和接收功能。发送子程序将机器人位置数据打包成消息并通过网络发送;接收子程序则解析接收到的数据,并将其转换回位置坐标。
4. 中断程序集成:在主程序中,设计了一个定时器中断程序,每0.8秒执行一次,调用发送和接收子程序。这个间隔时间需要根据实际测试调整,以确保数据的稳定传输,避免因为频率过高导致的通信问题。
5. PLC侧的编程:虽然文档没有详细说明,但提示读者可以参考先前提供的链接或相关的TCP通信教程,处理PLC发送位置坐标数据的部分。
本文提供了一个完整的流程,涵盖了从Rapid编程到网络通信的各个环节,为想要实现ABB机器人与S7-1200 PLC之间位置坐标数据交换的工程师提供了实用的指导。然而,由于该示例未经实际项目测试,用户在应用时必须确保所有代码的安全性和稳定性,并根据具体环境进行必要的调整。
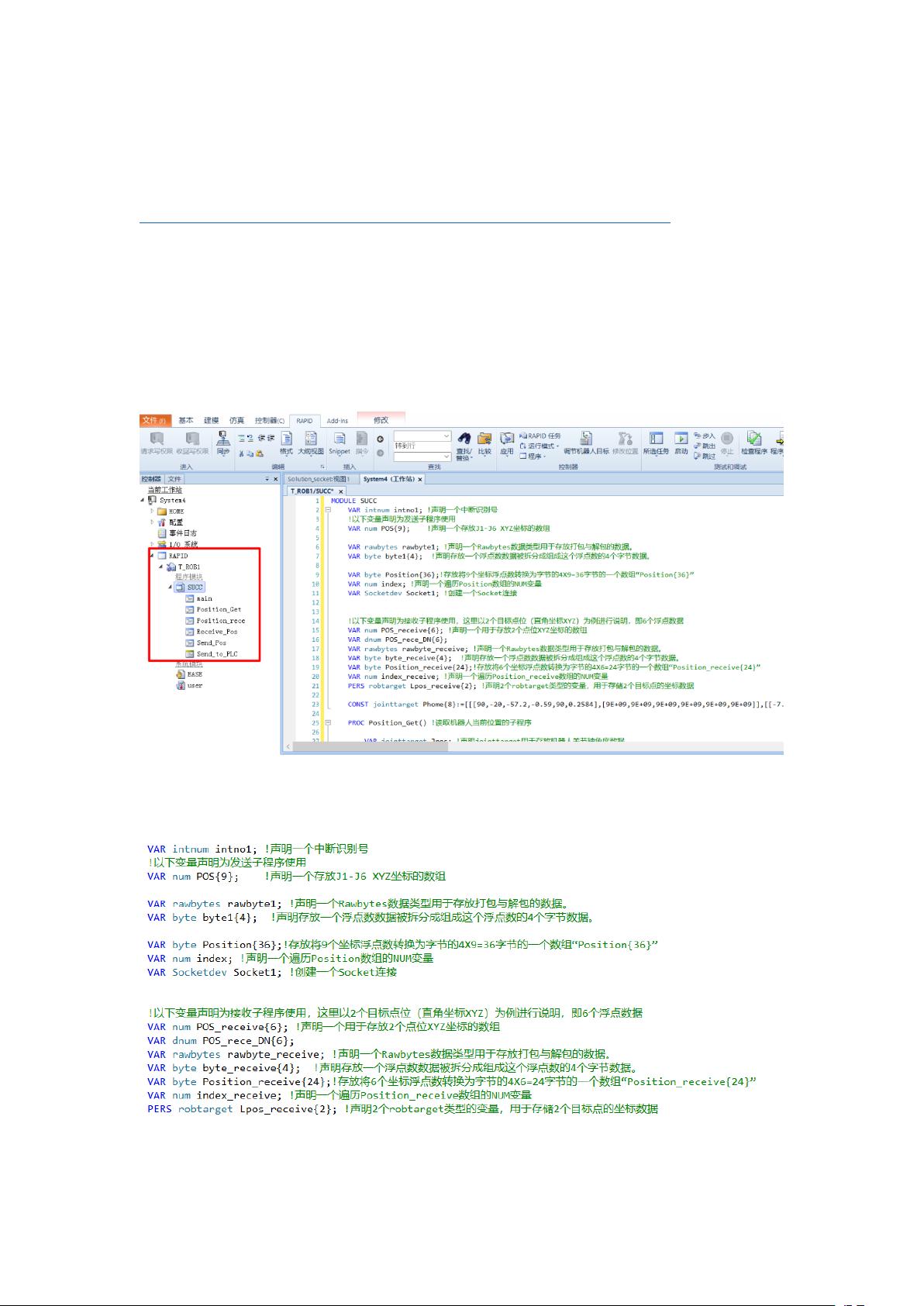
ABB 机器人与 S7-1200PLC 实现位置坐标数据发送和接收的具体方法
上次和大家分享了 ABB 机器人与 S7-1200 PLC 进行 Socket 通信时的基本设置和简单编程测
试,具体可查阅以下链接中的内容:
S7-1200 与 ABB 机器人进行 SOCKET 通信的具体方法
本次继续和大家分享,通过 Socket 通信(TCP)实现 ABB 机器人与 S7-1200 PLC 之间进行
位置坐标数据交互的具体方法。
注意:本次示例的内容没有经过实际项目测试,仅用于技术研究,请注意安全并谨慎使用,
一切后果与作者无关。
如下图所示,打开 Robot Studio 创建一个项目,在 RAPID 中编写我们所需要的程序,
如下图所示,首先声明一些必需的变量,有关变量的具体功能可参考图片中的注释,
下载后可阅读完整内容,剩余3页未读,立即下载
1290 浏览量
426 浏览量
2803 浏览量
3214 浏览量
1922 浏览量
588 浏览量
249 浏览量

AAA_自动化工程师
- 粉丝: 7347
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android实现四区间自定义进度条详解
- MATLAB实现kohonen网络聚类算法分析与应用
- 实现条件加载:掌握webpack-conditional-loader的技巧
- VC++实现的Base64编码解码工具库介绍
- Android高仿滴滴打车软件项目源码解析
- 打造个性JS选项卡导航菜单特效
- Cubemem:基于旧方法的Rubik立方体求解器
- TQ2440 Nand Flash测试程序:读写擦除操作详解
- 跨平台Android apk加密工具发布及使用教程
- Oracle锁对象快速定位与解锁解决方案
- 自动化MacBook维护:Linux下Shell脚本
- JavaEE实现的个人主页与签到管理系统
- 深入探究libsystemd-qt:Qt环境下的Systemd DBus API封装
- JAVA三层架构购物网站设计与Hibernate模块入门指南
- UltimateDefrag3.0汉化版:磁盘整理新体验
- Sigma Phi Delta官方网站:基于Jekyll四十主题的Beta-Nu分会
