C51单片机实现自动寻迹小车设计解析
下载需积分: 10 | PPT格式 | 1.68MB |
更新于2024-07-31
| 122 浏览量 | 举报
"这篇资源是昆明学院的一个课程项目,旨在教授如何使用C51单片机设计一个自动寻迹小车。项目详细介绍了小车的设计要求、工作原理以及方案选择与论证,适合初学者学习。"
小车智能设计的知识点详解:
1. **设计要求**:
- 小车需从安全区域启动并沿着指定路线运行,能够自动识别直线和弯路,并在特定弯路处灵活转弯。
- 完成任务后,小车应能返回起点并自动倒车入库。
2. **工作原理** - **红外探测法**:
- 小车利用红外传感器检测地面颜色差异,红外光在黑白不同材质上反射或吸收的特性来判断黑线位置。
- 接收管接收到反射光时,表明小车在白线上;若接收不到,表示小车已偏离白线,进入黑线区域。
- 单片机通过分析红外信号来控制小车的行驶方向。
3. **系统组成**:
- **控制器模块**:C51单片机作为核心,处理传感器输入并控制电机运行。
- **电源模块**:为整个系统提供稳定电源。
- **寻迹传感器模块**:包含红外探测器,负责感知地面的黑白差异。
- **直流电机及其驱动模块**:用于驱动小车前进、后退、转弯。
- **车架**:支撑所有组件并确保稳定性。
4. **方案选择与论证**:
- **方案1**:玩具电动车改造。优点是车架完整,但电机性能可能不足,且改装困难。
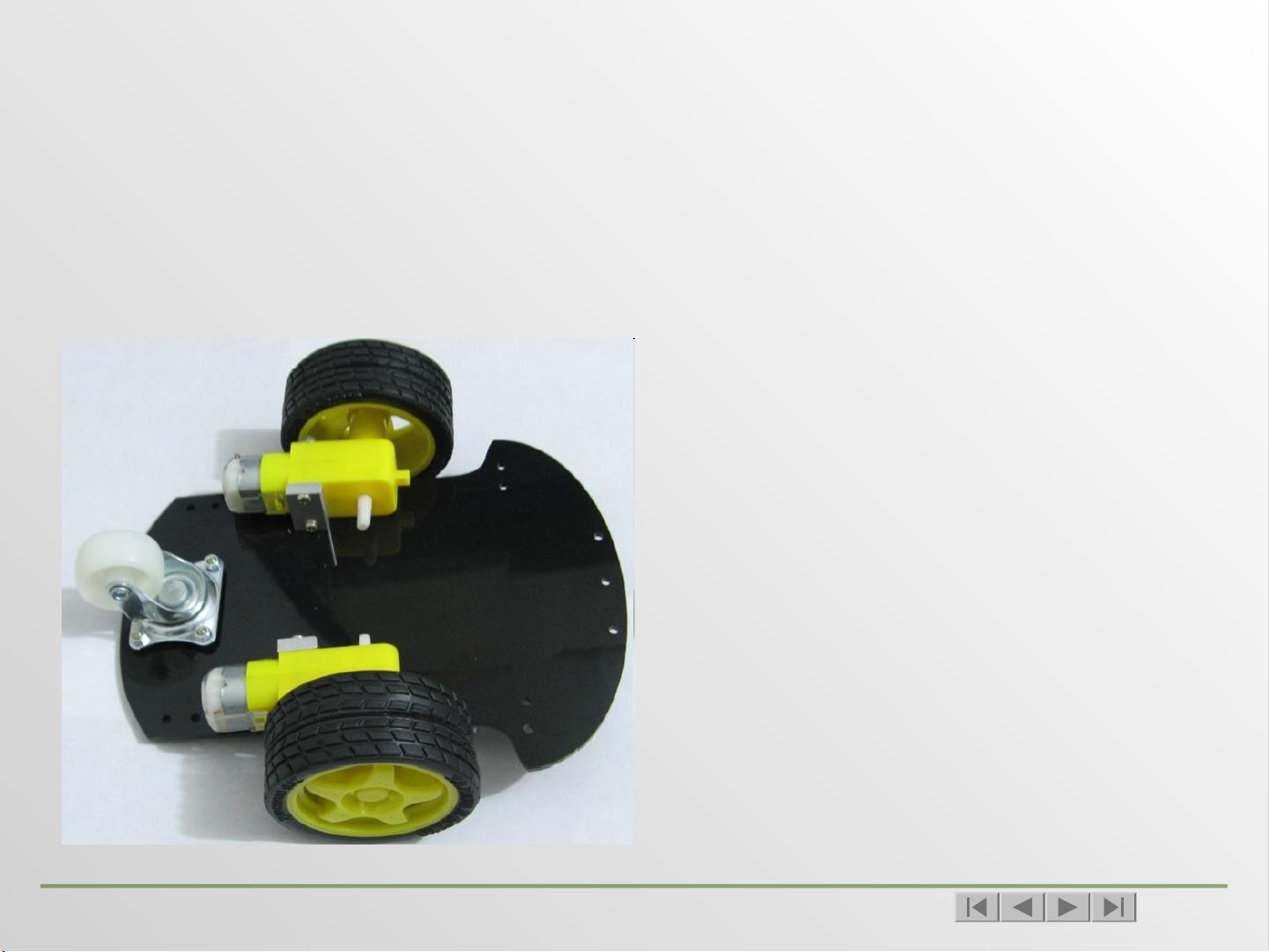
- **方案2**:左右两轮驱动,万向轮转向。优点是易于实现原地旋转,控制简单,但可能稳定性不佳。
- **方案3**:四轮独立驱动。优点是运动灵活性高,承重好,但控制复杂,能耗较高。
5. **方案选择的考量因素**:
- **操控灵活性**:左右两轮驱动方案更适合原地转向。
- **控制难度**:四轮驱动方案控制四个电机的难度大于两轮驱动。
- **能源效率**:两轮驱动方案更节能。
- **承载能力与稳定性**:四轮驱动方案承载能力和稳定性更好,但可能更耗电。
通过这个项目,初学者可以了解到小车智能设计的基本思路,包括传感器的应用、动力系统的选择以及控制系统的设计,对于理解和实践单片机控制下的智能小车有极大帮助。
剩余21页未读,继续阅读
相关推荐





a2273672
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 革新操作体验:无需最小化按钮的窗口快速最小化工具
- VFP9编程实现EXCEL操作辅助软件的使用指南
- Apache CXF 2.2.9版本特性及资源下载指南
- Android黄金矿工游戏核心逻辑揭秘
- SQLyog企业版激活方法及文件结构解析
- PHP Flash投票系统源码及学习项目资源v1.2
- lhgDialog-4.2.0:轻量级且美观的弹窗组件,多皮肤支持
- ReactiveMaps:React组件库实现地图实时更新功能
- U盘硬件设计全方位学习资料
- Codice:一站式在线笔记与任务管理解决方案
- MyBatis自动生成POJO和Mapper工具类的介绍与应用
- 学生选课系统设计模版与概要设计指南
- radiusmanager 3.9.0 中文包发布
- 7LOG v1.0 正式版:多元技术项目源码包
- Newtonsoft.Json.dll 6.0版本:序列化与反序列化新突破
- Android实现SQLite数据库高效分页加载技巧
