西门子PLC基础指令详解:NOP、END、STOP与WDR
21 浏览量
更新于2024-06-30
收藏 1.02MB PPT 举报
西门子PLC应用指令推选PPT文档详细介绍了西门子PLC中的一系列关键指令,包括空操作、结束及暂停、看门狗复位和高速计数器操作。首先,空操作指令NOP用于在程序执行期间进行无实际功能的操作,其仅占用时间,不会影响程序流程,通过标号N指定执行位置。
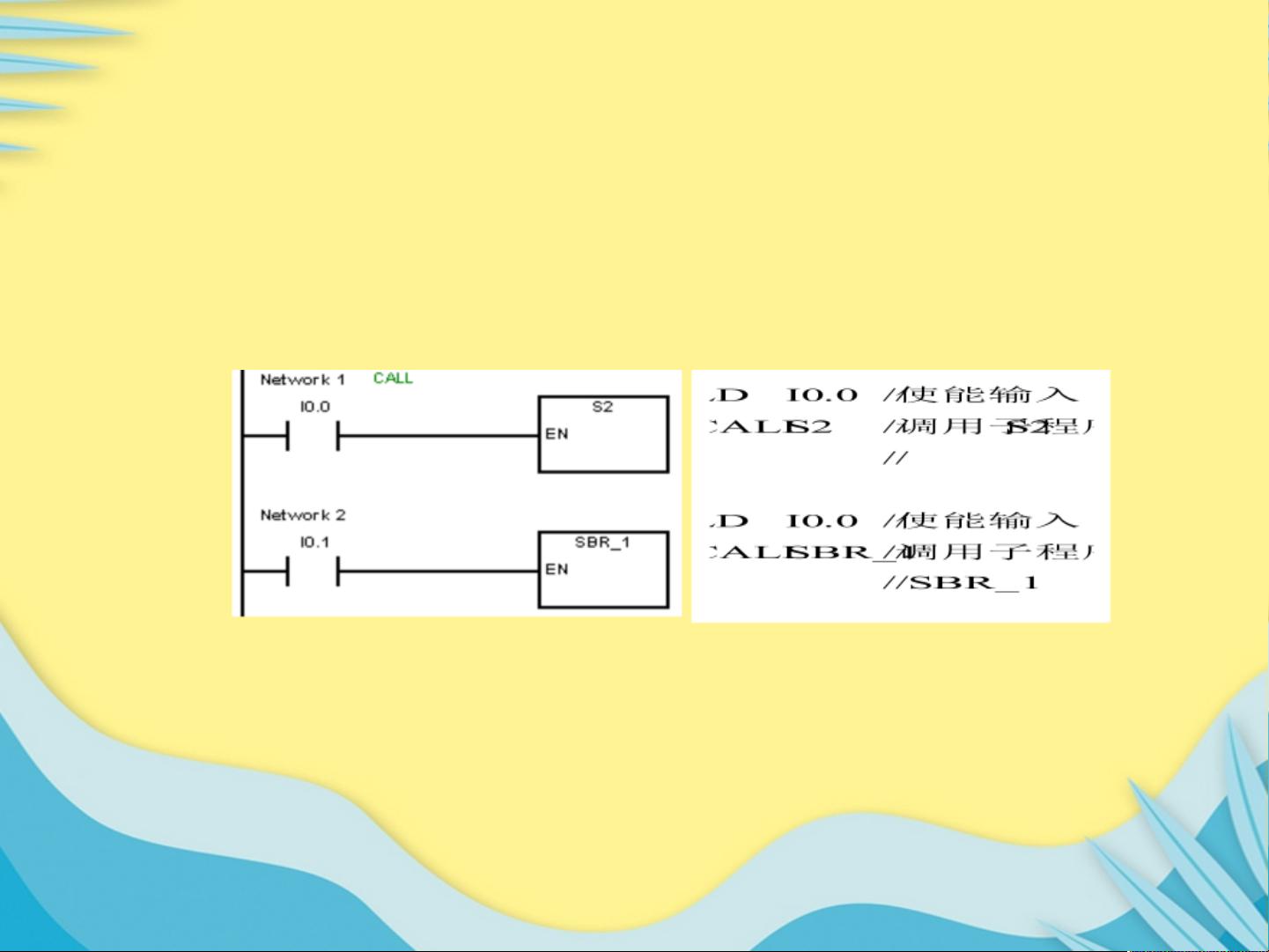
结束指令分为有条件结束END和无条件结束MEND。END在使能输入有效时终止用户主程序,而MEND则在任何时候都会强制结束,返回至主程序开头。在Micro/Win32编程环境中,MEND由软件自动处理,用户无需手动输入。
暂停指令STOP则用于临时中断程序执行,当接收到外部信号时,主机CPU会从RUN模式切换到STOP模式。这个指令不考虑特殊标志寄存器或能流的影响。
看门狗复位指令WDR允许在使能输入下定期重置看门狗定时器,防止因为扫描周期过短而导致的超时错误。通过设置STOP或WDR,程序员可以根据需要调整系统的响应时间。
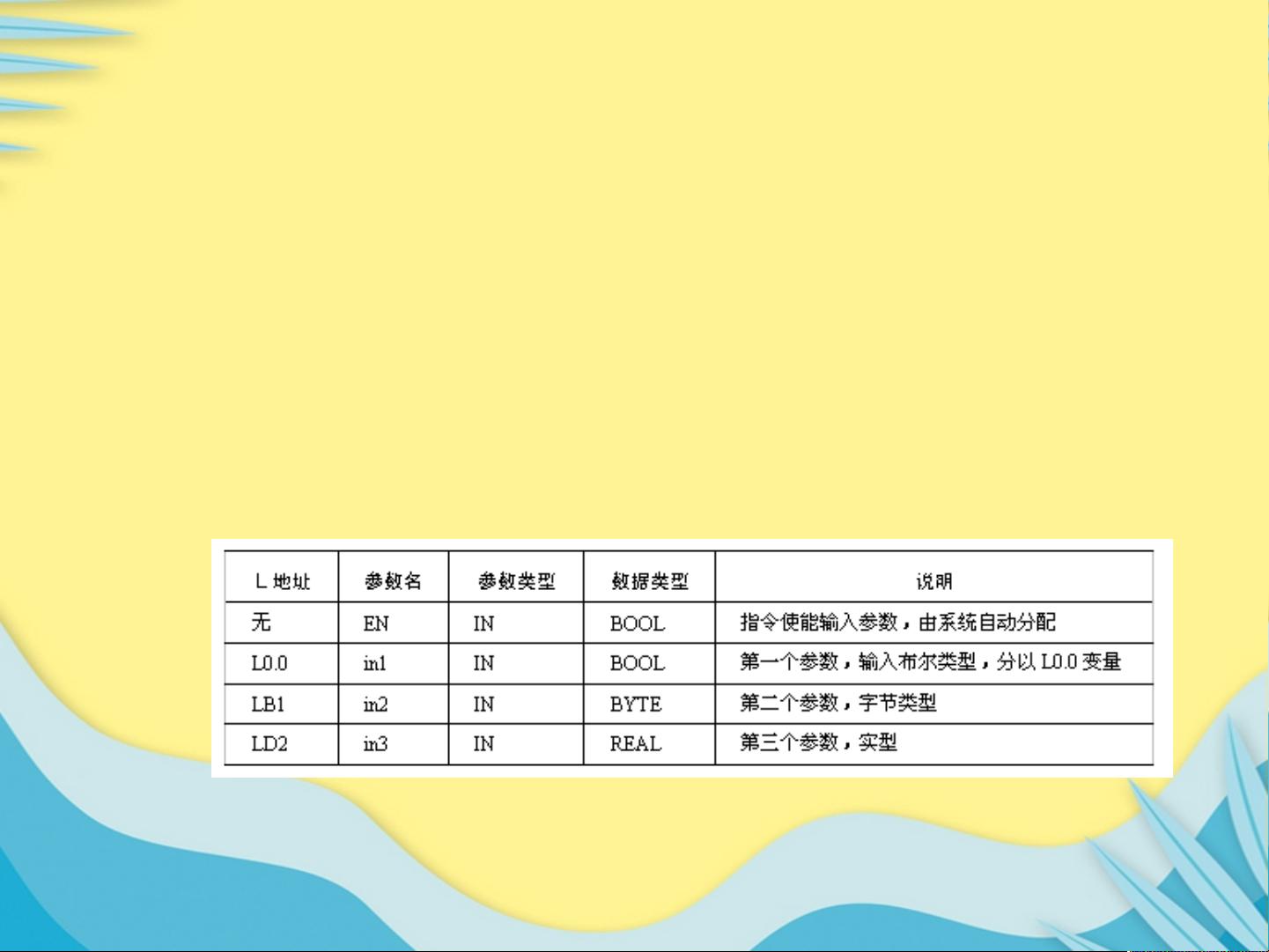
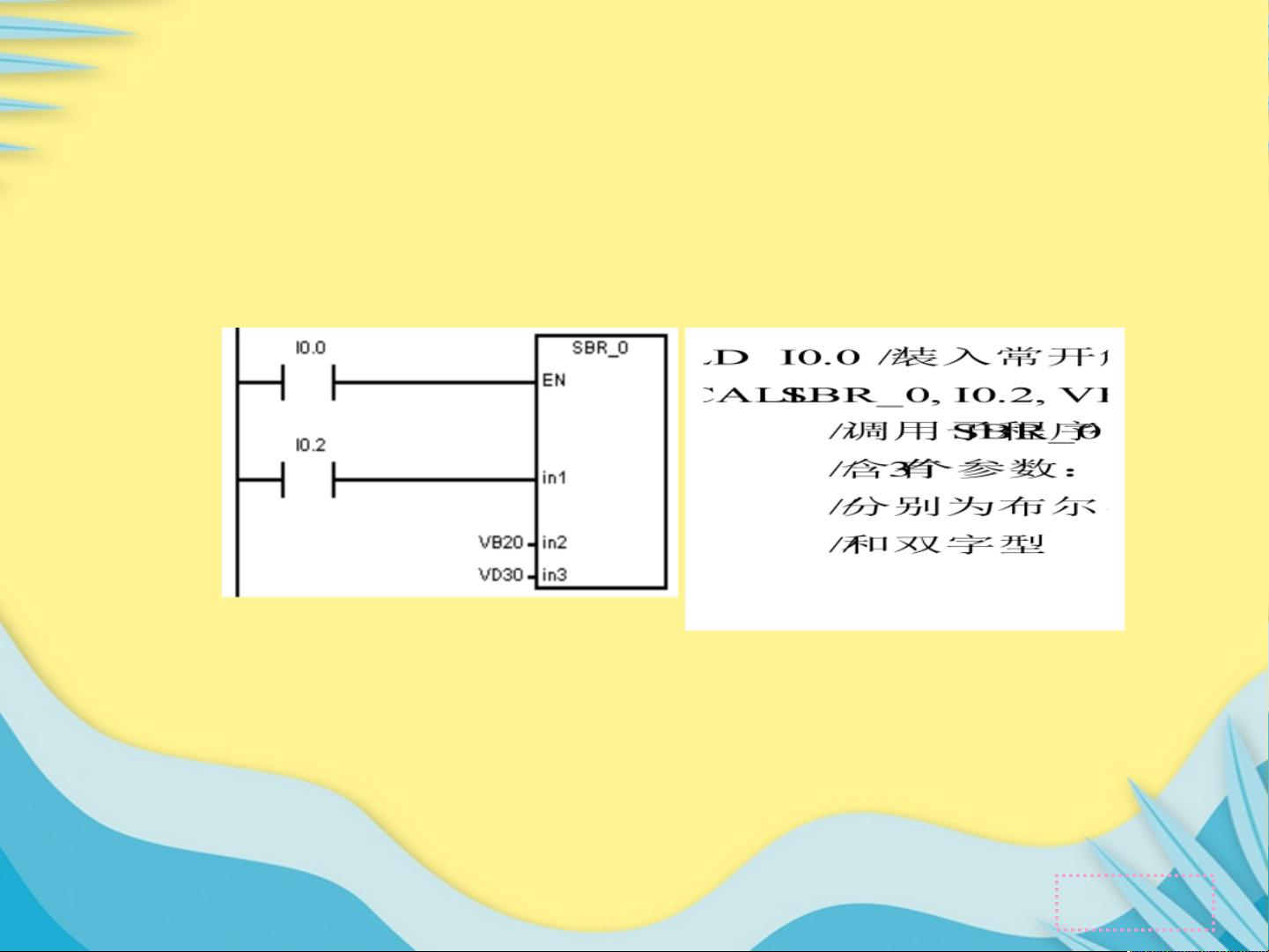
高速计数器指令HSC用于精确计数,它需要在特定工作模式下操作,并且输入端的选择受到系统限制,与状态字节中的状态位功能密切相关。指令格式中,NOP配合N参数,而梯形图的指令盒提供了数据输入端TBL,用于指定回路表的起始地址。
该PPT文档还展示了这些指令的实际应用场景,例如检查I/O错误、监控运行时刻、响应外部开关、控制程序停止以及管理看门狗定时器。通过理解和熟练运用这些指令,用户可以编写出高效且可靠的西门子PLC控制系统。
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-10-27 上传
2022-10-27 上传
2022-10-27 上传
2022-10-27 上传

xinkai1688
- 粉丝: 381
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
