
第 40 卷 第 9 期
2020 年 9 月
电 力 自 动 化 设 备
Electric Power Automation Equipment
Vol.40 No.9
Sept. 2020
一种扩展 LCL 型并网逆变器有效阻尼区的超前补偿方法
华 铤,林 桦,肖建杰,王兴伟
(华中科技大学 电气与电子工程学院 电力电子与能量管理教育部重点实验室,湖北 武汉 430074)
摘要:考虑数字控制延迟,LCL 型并网逆变器系统的有效阻尼区仅在采样频率 f
s
的 1/6 以内,较窄的阻尼区间
使得系统的稳定区域很小,不利于系统参数的设计。针对此问题,提出一种在阻尼环路中加入超前补偿控制
器的改进方法。首先,通过分析系统的有源阻尼特性,得出加入超前补偿后系统的有效阻尼区可以扩展到
(0,f
R
),其中 f
R
∈(f
s
/ 6,f
s
/ 3)。接着分析了加入超前补偿后被控对象的稳定性,给出临界电容电流反馈系数与
超前补偿参数之间的关系。为了扩大原系统的稳定区域,提出了一套超前补偿控制器的参数设计方法。最
后通过实验进行验证,实验结果验证了所提方法的有效性。
关键词:LCL 型并网逆变器;电容电流反馈;控制延迟;有效阻尼区;稳定区域;补偿
中图分类号:TM 464 文献标志码:A DOI:10.16081/j.epae.202009002
0 引言
并网逆变器作为并网系统的必要设备,是分布
式发电的重要接口,可用于电能质量控制
[1⁃2]
。滤波
器是连接并网逆变器和电网的必要设备。目前大多
数使用的滤波器类型是 L、LC 和 LCL。当滤波效果
相同时,LCL 型滤波器所需要的 2 个电感值之和显
著小于 L 型滤波器所需的电感值,因此其体积更小、
成本更低
[3 ⁃ 4]
。但 LCL 型滤波器为三阶系统,存在谐
振问题
[5]
。解决谐振问题最简单的方法是无源阻尼
法
[6]
,即在 LCL 型滤波器的元件上串联或者并联电
阻,但这种方法会带来严重的损耗问题,所以在实
际工程中并不实用。另一种方法是有源阻尼法,包
括电容电流反馈法
[7⁃13]
、并网电流反馈法
[14⁃15]
以及
电容电压反馈法等。有源阻尼法的优点是:通过控
制算法有效阻尼系统的谐振尖峰,保证系统稳定的
同时不增加系统损耗。考虑到数字控制延时,电容
电流反馈有源阻尼等效为在滤波电容上并联一个与
频率相关的阻抗。当频率高于采样频率 f
s
的 1 / 6
(即 f
s
/6)时,该等效阻抗表现出负阻特性,而负阻会
降低系统对电网阻抗的鲁棒性。特别地,当谐振频
率等于 f
s
/ 6 时,系统无法稳定
[7]
。所以电容电流反
馈有源阻尼的有效阻尼区为(0,f
s
/ 6)。由于有效阻
尼区过窄,LCL 型并网逆变器系统的稳定区域很小,
不利于参数的设计,所以有必要扩展有效阻尼区。
文献[8]采用过采样的调制策略,在一个开关周
期内多次采样多次装载调制信号;文献[9]提出了一
种基于区域均衡思想的时滞补偿方法;文献[10]采
用实时装载的方法,使调制波的装载时刻靠近采样
时刻。这 3 种方法都是从改变调制方式角度来减小
控制延时。文献[11⁃12]采用有源阻尼与无源阻尼
相结合的混合阻尼策略,该方法对阻尼参数的要求
较高,需反复检验设计的参数是否满足要求,不便于
工程应用。文献[13]在脉冲宽度调制器与电流调节
器之间加入陷波器模块,文献[14]提出基于滑模控
制的新型有源阻尼方法,这 2 种方法都增强了系统
对电网阻抗的鲁棒性,但由于是在前向通道中加入
控制器,对强电网下系统的稳定性会产生不利影响。
文献[15]采用高通滤波器来提高有效阻尼范围,该
方法也对系统的稳定性能影响较大,容易使系统不
稳定。
为了 减小对 弱电网 下系统 性能的 影响,文献
[16]在阻尼环路加入超前补偿控制器来增强 LCL 型
并网逆变器系统对电网阻抗的鲁棒性,但为降低控
制器的设计难度,对超前补偿进行了一定的简化,同
时未分析控制器参数对系统性能的影响。因此,本
文从扩展系统有效阻尼区角度出发,给出另一种超
前补偿控制器的参数设计方法。该方法可以将系统
有效阻尼区扩展到(0,f
R
),其中 f
R
∈(f
s
/ 6,f
s
/ 3),同时
扩大原系统的稳定区域。最后通过实验验证所提出
方法的有效性。
1 LCL 型并网逆变器的数学模型
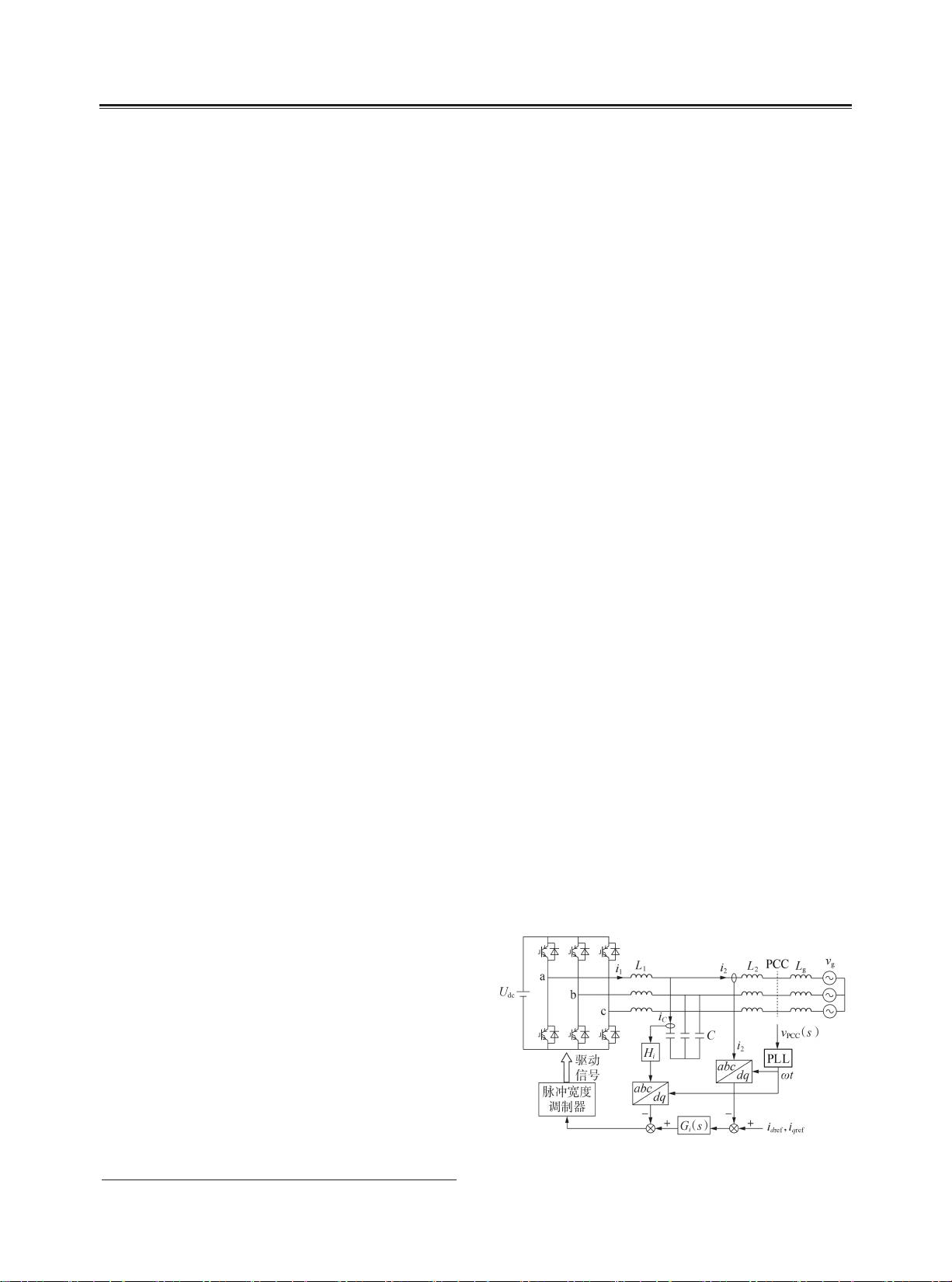
图 1 为三相 LCL 型并网逆变器的控制结构。图
收稿日期:2020-01-16;修回日期:2020-07-07
图 1 LCL 型并网逆变器及其控制原理图
Fig.1 Diagram of LCL-type grid-c onnected inverter and
its control principle
下载后可阅读完整内容,剩余6页未读,立即下载

weixin_38714653
- 粉丝: 3
- 资源: 929
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机二级Python真题解析与练习资料
- 无需安装即可运行的Windows版XMind 8
- 利用gif4j工具包实现GIF图片的高效裁剪与压缩
- VFH描述子在点云聚类识别中的应用案例
- SQL解释器项目资源,助力计算机专业毕业设计与课程作业
- Java实现Windows本机IP定时上报到服务器
- Windows Research Kernel源码构建指南及工具下载
- 自定义Python插件增强Sublime文本编辑器功能
- 自定义Android屏幕尺寸显示及Ydpi计算工具
- Scratch游戏编程源码合集:雷电战机与猫鼠大战
- ***网上教材管理系统设计与实现详解
- Windows环境下VSCode及Python安装与配置教程
- MinGW-64bit编译opencv库适配Qt5.14
- JavaScript API 中文离线版手册(CHM格式)
- *** 8 MVC应用多语言资源管理技巧
- 互联网+培训资料深度解析与案例分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


