Accelnet微型模块:高性能数字伺服驱动器
需积分: 16 144 浏览量
更新于2024-07-09
收藏 2.05MB PDF 举报
"Accelnet_Micro_Module.pdf 是一份关于CopleyControls公司的数字伺服驱动器的产品手册,主要介绍了一款适用于无刷/有刷电机的微型模块——Accelnet Micro Module。该驱动器具备多种功能和特性,如自动调谐算法、强大的示波器和波形发生器、空间矢量调制技术以及载波消除调制等。"
这篇文档详细介绍了Accelnet Micro Module这一系列的数字伺服驱动器,它们包括ACK-090-20、ACK-090-30、ACK-055-06、ACK-055-10、ACK-090-04和ACK-090-08等多个型号,适用于不同类型的电机应用。驱动器的一个显著特点是其内置的自动调谐算法,能够缩短系统的设置时间,通过自动化电机相位调整和电流环调谐来快速完成系统调试。
文档中还提到了一个强大的内置示波器和波形发生器,这两个工具对驱动器性能的精细调整非常有用。此外,驱动器的配置信息可以保存在非易失性闪存中,这意味着原始设备制造商(OEM)可以库存通用部件,并根据机器中每个轴的需求现场配置驱动器。
空间矢量调制(SVM)技术是该驱动器的一大亮点,它能提供更高的电机速度和更低的电机功率损耗,对比传统的正弦PWM调制具有优势。同时,采用的载波消除调制几乎消除了电机纹波电流和静止时的功率损耗。驱动器的电流环采样频率为15 kHz,位置和速度环为3 kHz,PWM纹波为30 kHz。所有驱动电路都是直流耦合的,并且可以从未调节的变压器隔离线性直流电源或调节的开关电源运行。
此外,文档还提及了驱动器的电源兼容性,既可使用未调节的变压器隔离线性直流电源,也可使用调节的开关电源。这提供了更大的灵活性,以适应不同的工作环境和系统需求。Accelnet Micro Module是一款高度集成、高性能的数字伺服驱动解决方案,适用于需要精确控制和高效运行的工业应用。
10 k
2.2 nF
74HC14
4.99k
[IN5]
+5V
19
Hall W
20Hall V
17
Hall U
22
Encoder /X
21Encoder X
24
Encoder /B
23Encoder B
25Encoder A
26Encoder /A
HALLS
U
V
W
Encoder
Motor
A
/A
B
/B
X
/X
22
Ref(-)
21Ref(+)
24
Cos(-)
23Cos(+)
25Sin(+)
26Sin(-)
Resolver
Motor
S3
S1
S2
S4
R1
R2
SECONDARY
ENCODER
Gnd
Gnd
A
+
[IN7]
B
+
[IN8]
+
5
V
d
c
+5 V
Accelnet
Micro Module
RoHS
ACK
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547
P/N 16-01646 Rev 01 Page 5 of 25
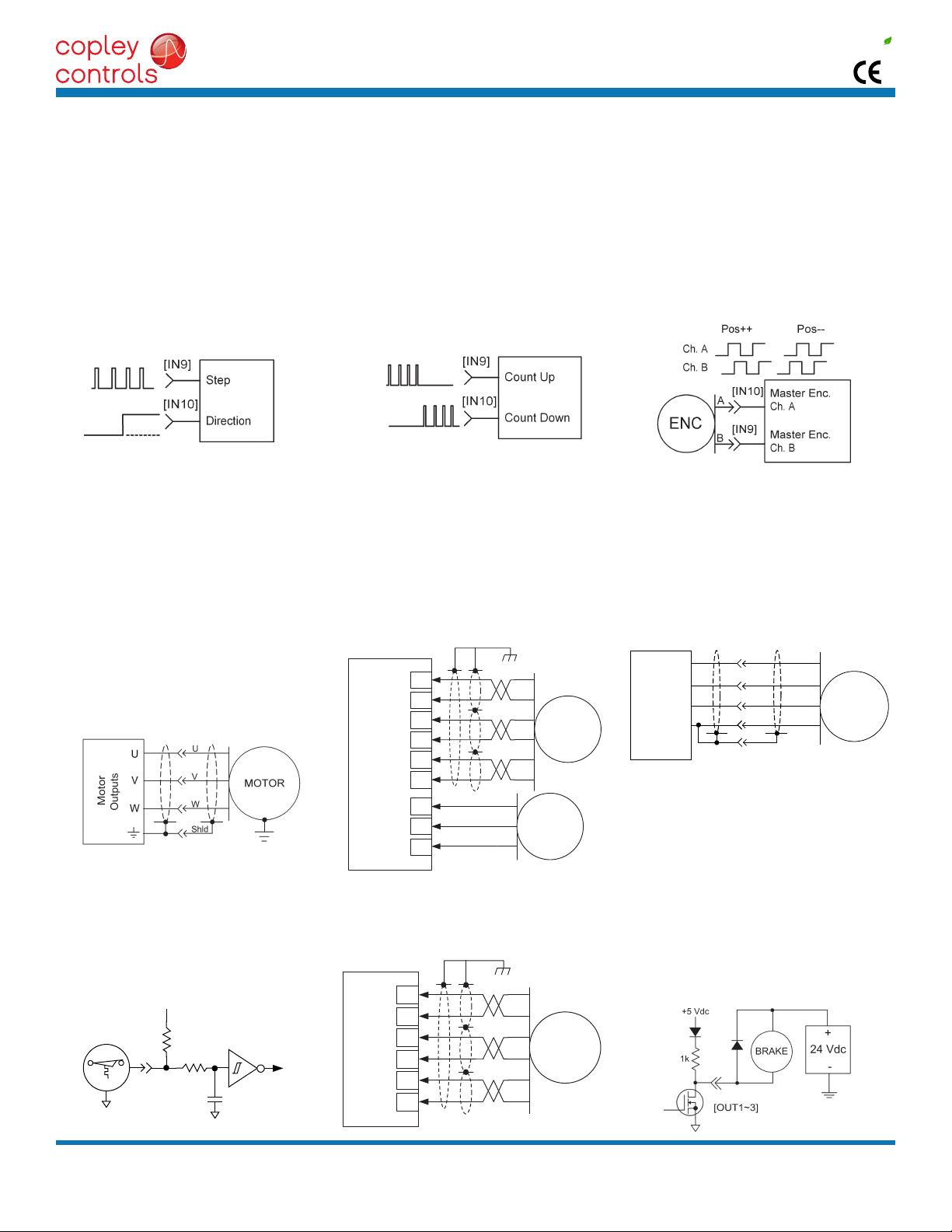
STAND-ALONE MODE DIGITAL POSITION-CONTROL INPUTS
Accelnet Micro Module works with motion controllers that output pulses to command position.
These formats are supported:
Step/Direction
CU/CD
A/B Quadrature Encoder
In Step/Direction mode, a pulse-train controls motor position, and the direction is controlled by a DC level at the Direction input.
CU/CD (Count-Up/Count-Down) signals command the motor to move CW or CCW depending on which input the pulse-train is directed to. The motor can
also be operated in an electronic gearing mode by connecting the inputs to a quadrature encoder on another motor. In all cases the ratio between input
pulses and motor revolutions is programmable.
STEP/DIRECTION INPUTS COUNT-UP/COUNT-DOWN INPUTS QUAD A/B ENCODER INPUTS
MOTOR PHASE CONNECTIONS
The drive output is a dual H-bridge that converts
the DC buss voltage (+HV) into sinusoidal voltage
waveforms that drive the motor phases. Cable
should be sized for the continuous current rating
of the drive. Motor cabling should use twisted,
shielded conductors for CE compliance, and to
minimize PWM noise coupling into other circuits.
MOTOR CONNECTIONS
Motor connections are of ve types: phase, Halls, temperature sensor, encoder and resolver (option). The phase connections carry the drive output currents
that drive the motor to produce motion. The Hall signals are three digital signals that give absolute position feedback within an electrical commutation
cycle. A temperature sensor can shut down the drive to protect the motor from over-heating. The encoder and resolver signals give incremental position
feedback and are used for velocity and position modes, as well as sinusoidal commutation.
MOTOR ENCODER
Six dedicated inputs accept the encoder A, B,
and X (index) signals. Encoders with differential
outputs must be used.
MOTOR RESOLVER (-R option)
Resolvers use only six connections and do not
need +5V.
MOTOR TEMPERATURE SENSOR
Digital input [IN5] is programmable for use with a
motor overtemperature switch. The input should
be programmed as a pull-up to +5 Vdc if the motor
switch is grounded.
MOTOR BRAKE
Digital outputs [OUT1,2,3] can be programmed to
power a motor-mounted brake. These brake the
motor when they are in an unpowered state and
must have power applied to release. This provides
a fail-safe function that prevents motor motion
if the system is in an unpowered (uncontrolled)
state. Because brakes are inductive loads, an
external yback diode must be used to control the
coil voltage when power is removed. The timing
of the brake is programmable.
SECONDARY ENCODER
Inputs [IN7] & [IN8] accept the encoder A and B
signals. Encoders with single-ended active outputs
must be used.
剩余24页未读,继续阅读
2019-08-18 上传
2014-02-23 上传
2021-11-27 上传
2022-07-15 上传
2022-12-09 上传
2022-06-29 上传
2022-06-29 上传

yangtianxia586
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于PIC16F877的小型数据采集卡的设计
- 单调谐放大器 对单调谐放大器的介绍对入门者很有帮助
- Verilog经典教程
- 北京大学 数理逻辑课件
- 解析SOA架构与相关技术
- 实验教学管理系统需求规格说明书
- GBT131-2006图样画法与标注的变化
- Wpf入门白皮书—适合新人使用
- DVD租赁优化方案(特等奖文章)
- 关于数据结构的将帅算法
- 单词的词法分析程序设计C++版编译试验
- 操作系统-精髓与设计原理[第五版]课后习题答案(完整版)
- 计算机本科考试企业网练习题(附答案)
- Web_Service开发指南
- 2009年上半年程序员下午题
- 2009年上半年全国计算机技术与软件专业技术资格(水平)考试程序员试题
