MRPT应用指南:从安装到实战
"这是一本关于MRPT(Mobile Robot Programming Toolkit)的中文入门手册,适合初学者使用。手册涵盖了MRPT V1.0.2版本的相关内容,包括各种应用工具的介绍、安装指南以及具体软件的使用方法。"
MRPT(Mobile Robot Programming Toolkit)是一个开源的C++库,专门用于移动机器人技术的研究和开发。它提供了大量的算法和工具,用于处理传感器数据、构建地图、路径规划、导航以及 SLAM(同时定位与建图)等任务。该手册针对MRPT V1.0.2版本,是学习和理解MRPT功能和用法的重要参考资料。
手册首先介绍了MRPT的应用工具,如GridmapNavSimul(栅格地图导航模拟器)、RawLogViewer(原始记录查看器)、RawLog-Grabber(原始记录抓取器)、RawLog-Edit(原始记录编辑器)以及ReactiveNavigationDemo和ReactiveNav3D-Demo(被动式导航演示)。这些工具覆盖了从数据采集、处理到模拟和分析的各个环节,对于实际操作和理解MRPT的工作流程至关重要。
GridmapNavSimul是用于模拟导航的工具,可以帮助用户理解如何在栅格地图上进行路径规划。RawLogViewer则是一个强大的日志查看器,可以查看和编辑来自机器人传感器的数据,包括地图、传感器位姿和扫描匹配等功能。RawLog-Grabber用于实时捕获机器人的传感器数据,而RawLog-Edit则提供对这些数据的编辑能力,如剪切、删除和修改。ReactiveNavigationDemo和ReactiveNav3D-Demo提供了直观的界面,用于演示和测试基于感知的导航算法。
在使用MRPT时,需要注意安装完成后将`mrpt/bin`目录添加到系统环境变量`PATH`中,以便能够运行MRPT的应用程序。手册还强调,虽然内容是根据MRPT官网翻译整理,但可能存在误差,因此建议开发者直接参考官方网站以获取最准确的信息。
这份手册为MRPT的学习者提供了全面的入门指导,无论是对于有C++基础的开发者还是对机器人导航感兴趣的初学者,都是一个宝贵的资源。通过学习和实践手册中的内容,读者可以深入理解和应用MRPT在移动机器人领域的各种功能。
9
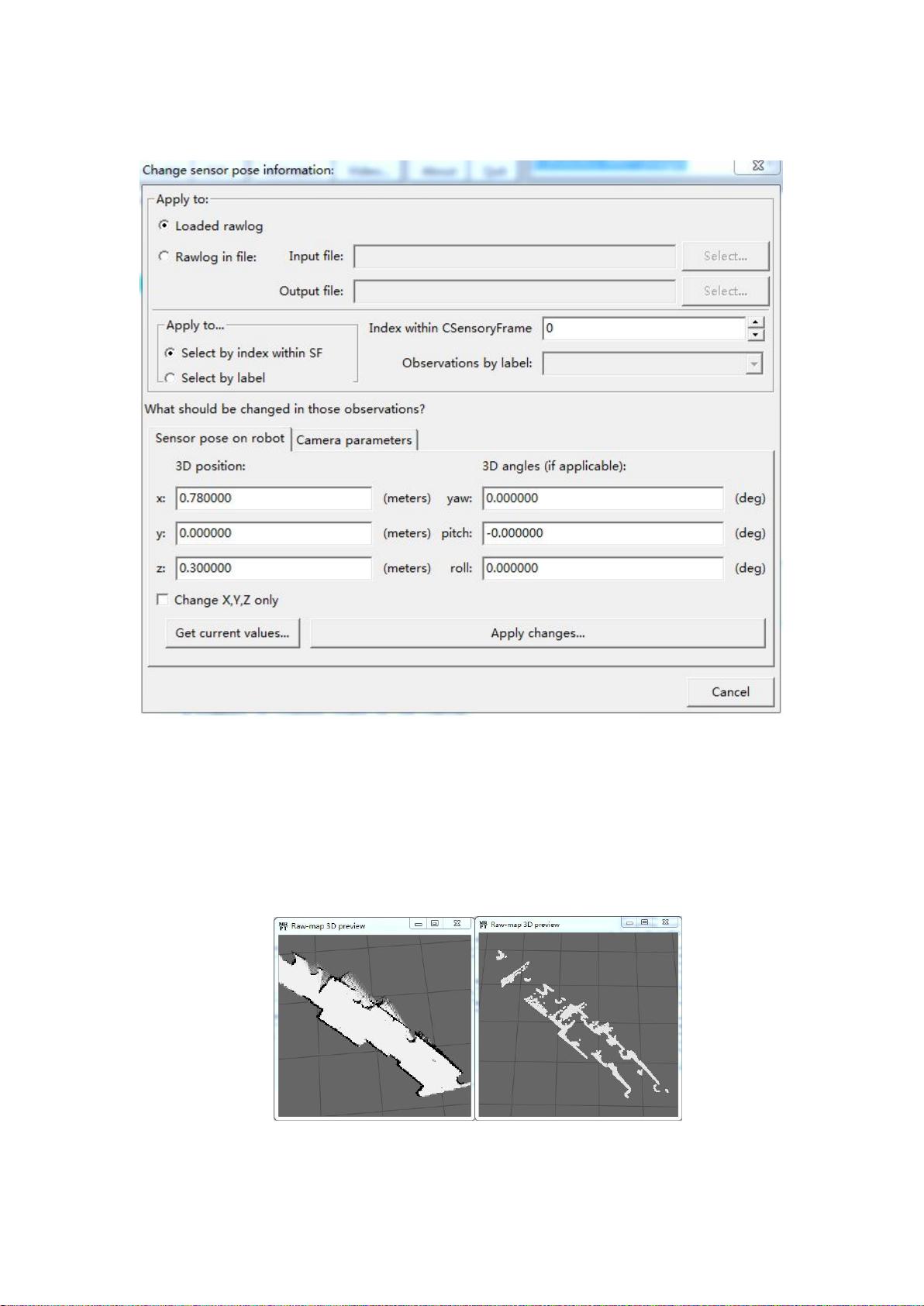
下面这个对话框允许用户一次完成获取和设置数据集中所有对象的位姿,通常与传感器标签
一起使用:
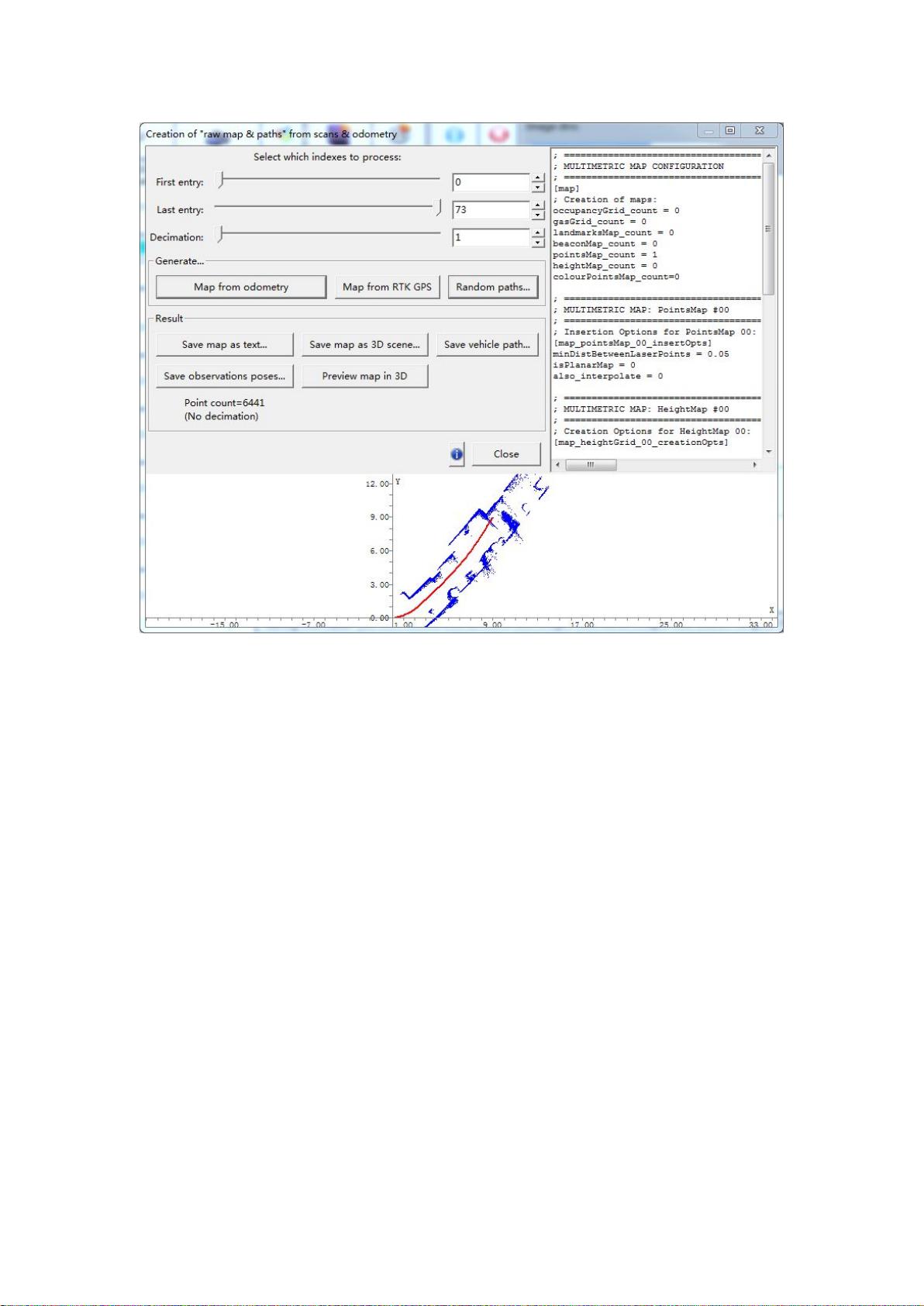
2.4 地图路径生成模块
选项路径:“Tools”->“Open the maps & path generatiion module ...”
描 述:这个对话框允许用户做 3 种事,主要用于 2D/3D 激光扫描数据。
用户可以使用 rawlog 文件中的激光扫描数据和里程计数据,或 GPS 数据,直接生成地
图【译者注:这种方法并没有使用 slam 算法】。点击 preview 可以在 3D 窗口查看。
右上角窗口是生成地图的配置文件内容,里面的参数可以被手动修改,比如改为生成占
据栅格地图。(目前仅支持生成点云地图和占据栅格地图 这两种地图)
剩余47页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-09-21 上传
107 浏览量
2014-10-29 上传
2021-09-30 上传
2021-07-23 上传
2022-09-19 上传

mengjie_10
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
