无人机数字舵机控制器设计:DSP技术的应用
需积分: 16 191 浏览量
更新于2024-09-11
收藏 212KB PDF 举报
"基于DSP的数字舵机控制器设计,针对某型无人机的模拟舵机控制器存在的问题,如控制参数调整不便、电位器易故障、体积大和抗干扰能力弱等,采用数字信号处理器(DSP)设计了一种新型的数字舵机控制器。该控制器使用特定型号的DSP芯片实现多路伺服控制,具有更优的控制性能,能够实现参数的不拆机修改,增强了灵活性和通用性。此外,文中还简述了所用交流舵机的结构,包括磁滞电动机、测速发电机等组件,并概述了数字式舵机控制器的总体设计,包括位置给定、反馈采样和控制策略。"
基于上述摘要,以下是更详细的知识点说明:
1. DSP(Digital Signal Processor):DSP是一种专门处理数字信号的微处理器,它可以高效地执行数学运算,特别是在实时处理复杂的数字信号时。在本设计中,DSP芯片被用于处理舵机控制中的数字信号,实现对舵机的精确控制。
2. 舵机控制器:舵机控制器是无人机系统中的关键部件,它接收来自飞控计算机的指令,控制舵机的角度以改变飞行方向。模拟舵机控制器使用电位器调整控制参数,存在易损坏和调整困难的问题。
3. 数字舵机控制器的优势:数字舵机控制器使用DSP,能实现更精确、灵活的控制,同时具有较强的抗干扰能力。它允许在不拆机的情况下修改控制参数,提高了系统的可靠性和维护性。
4. 无人机舵机:无人机上的舵机通常采用交流电动机,具有测速发电机和反馈电位计等组件,用于提供速度和位置的反馈信息。这种交流舵机使用三相交流电动机,并通过电容移相实现单相交流电源供电。
5. 数字式舵机控制器设计:控制器设计包含硬件和软件两部分。硬件部分主要涉及DSP芯片和驱动电路,软件部分则实现位置和速度反馈的采样以及控制算法。控制器通过串口与飞控计算机通信,根据给定信号和反馈信号决定对舵机的控制策略。
6. 伺服控制:伺服控制是一种闭环控制系统,通过比较期望位置(给定量)和实际位置(反馈量),实时调整输出以减小误差,确保舵机准确跟随指令。
7. 系统参数可调性:数字舵机控制器的参数调整通过软件完成,这不仅提高了调整的精度,也使得在无人机组装完成后仍能进行参数优化,避免了因电位器故障导致的维修问题。
8. 插板形式集成:舵机控制器以插板形式集成在飞控计算机内部,简化了系统架构,减少了外部连接,有利于提高整体系统的稳定性。
基于DSP的数字舵机控制器在无人机应用中提供了更先进、可靠的解决方案,改善了原有模拟控制器的不足,实现了更高效的飞行控制。
文章编号:!""# !$%&(’""()"! """% ")
基于 *+, 的数字舵机控制器设计
刘- 涛- 吕迅竑- 黄一敏
(南京航空航天大学自动化学院,江苏 南京- ’!""!()
摘- 要:介绍了某型无人机的数字式舵机控制器的设计。由于原使用的模拟式舵机控制器的控
制参数不易调整,且用于调整参数的电位器极易出现故障,设计了使用
./+$’"0’%!’ 作为 1,2
的数字式舵机控制器。本控制器使用 *+, 芯片对多路舵机实现了伺服控制,不但体积大大缩小,
而且控制性能更加优良,并实现了系统的各主要控制参数的不拆机修改,增加了控制器的灵活性
以及通用性。
关键词:
*+,;./+$’"0’%!’;伺服控制;数字舵机控制器
中图分类号:
3’#4 文献标识码:5
- - 某型无人机使用的模拟式舵机控制器控制参
数需用电位器进行调整,不易修改,且体积较大,
抗干扰能力不强。在舵机控制器在无人机上安装
好之后,控制参数的调整非常困难。由于受到舵
机齿轮的限制,舵机零位的调整必须于安装好以
后进行。由于电位器的可靠性相对较低,出现过
多起由于电位器工作异常而返厂维修的情况。因
此,用数字式舵机控制器取代模拟式舵机控制器
势在必行。数字式舵机控制器抗干扰能力强,参
数调整通过软件完成。
!- 某型无人机舵机简介
某型无人机选用的是交流舵机,该舵机由磁
滞电动机、测速发电机、减速器、电磁离合器、反馈
电位计及鼓轮组成
[!]
。测速机通过齿轮与磁滞
电动机相连,提供交流测速信号。反馈电位计安
装在鼓轮上,提供舵机的位置反馈信号。磁滞电
动机为三相交流电动机,通过电容移相,实现单相
交流电源供电
[’]
。电动机采用 6789 : 6789 控制
方式(即只控制电动机正转、反转、停止)。
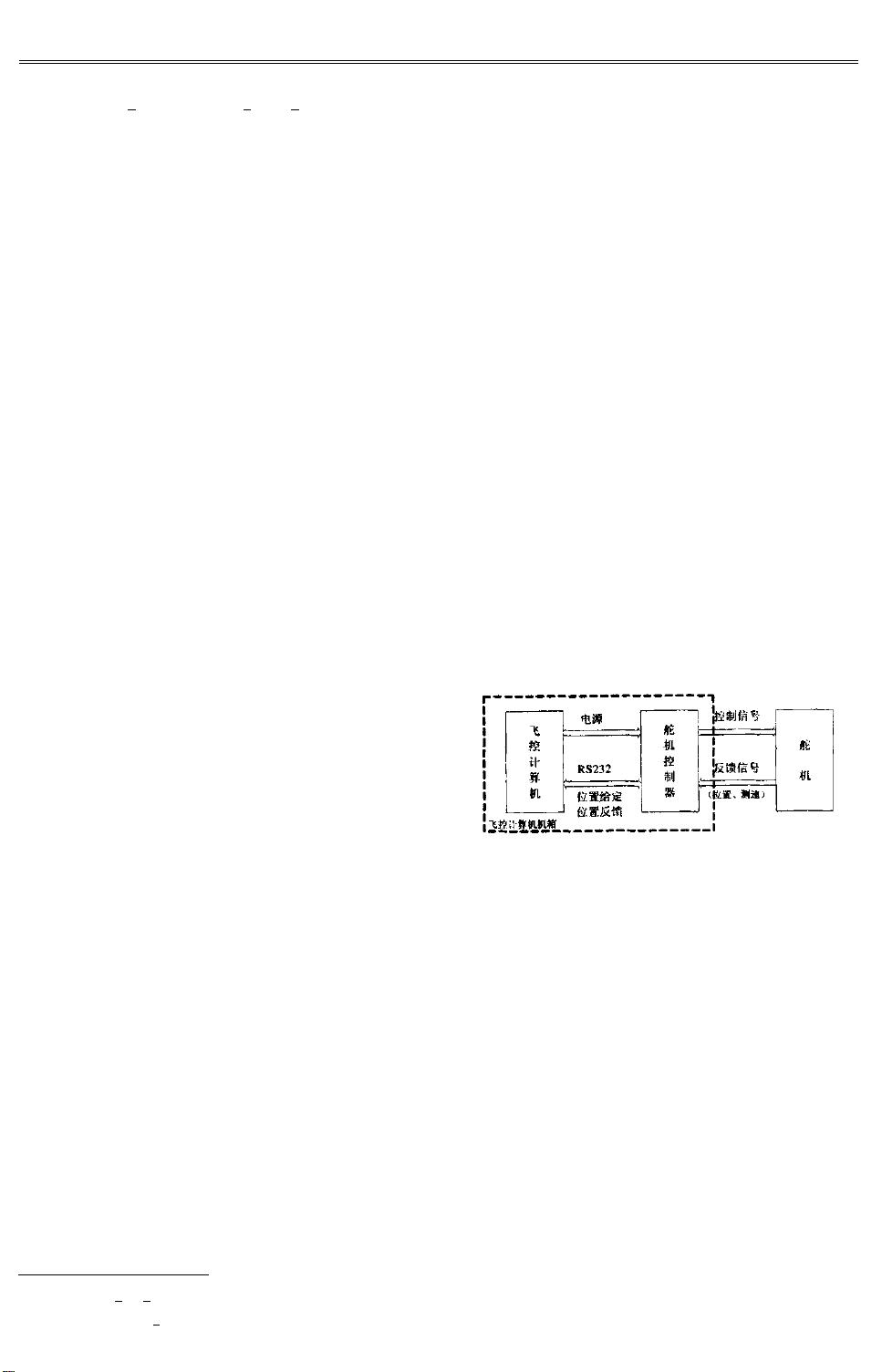
’- 数字式舵机控制器总体设计
舵机控制器控制舵机的基本原理是:飞控计
算机通过
;+’$’ 串口将舵机的位置给定信号以
数字形式送给舵机控制器并监控舵机的状态,舵
机控制器 5* 通道对舵机的位置和速度反馈
收稿日期:’""& !’ "&
作者简介:刘涛(!4## ),男,山东淄博人,在读研究生
信号采样,在软件中通过对给定量和反馈量的比
较来决定是否对舵机发送控制信号,经由驱动电
路实现对舵机的控制。舵机控制器以插板的形式
置于飞控计算机机箱内部,所需
&3 及 !&3 电源
由飞控计算机提供,总体框图如图 ! 所示。
图 !- 舵机控制器系统框图
$- 数字式舵机控制器硬件设计
数字式舵机控制器硬件由 *+, 及其外围电
路、反馈信号采样电路、驱动电路、串口通信电路
组成。硬件电路结构图如图 ’ 所示。
$< !- 1,2 及外围电路
1,2 选用 .= 公司的 *+, 芯片 ./+$’"0’%!’,此
芯片内部集成马达控制外围设备、串口外围设备、!(
通道的!’ 位的 5*1 以及 !’%> 片内 0?5+@ 存储器,
适合进行电机控制
[$]
。
*+, 的外围电路包括参数存储电路、时钟电路、
A.5B 接口电路和供电电源电路等。用 !(> 的 CC,D
;E/:’)?1!(F 进行控制参数存储。时钟电路使用
外部有源晶振,通过
1,2 内部 ,?? 倍频得到最大为
!&"/@G 的工作频率。*+, 芯片的 A.5B 口可实现在
线编程。由电源芯片 .,+#(#*$!% 将飞控计算机提
’""(年’月
第’$ 卷第! 期
沈阳航空工业学院学报
AHIJ87K HL +MN8O789 =8PQRQIQN HL 5NJH87IQRS7K C89R8NNJR89
0NT< ’""(
3HK< ’$- UH< !
下载后可阅读完整内容,剩余5页未读,立即下载
2021-07-13 上传
2021-07-13 上传
2021-09-05 上传
2021-07-13 上传
2023-08-15 上传
2021-07-13 上传
2021-09-21 上传
2021-07-13 上传

wyy1234321
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
