自制自平衡小车:传感器融合与控制策略
需积分: 10 153 浏览量
更新于2024-07-30
收藏 553KB PDF 举报
标题:"平衡小车:自平衡技术详解与集成传感器应用"
在现代科技领域,自平衡小车已经成为了一种极具启发性的项目,尤其是在教育和娱乐方面。这种小车的核心技术在于精确地整合加速度计(accelerometer)和陀螺仪(gyroscope)的测量数据,以实现平台的稳定平衡。本文将深入探讨这两类传感器的工作原理以及它们在平衡小车设计中的关键作用。
首先,2轴加速度计是一种能够测量物体所受加速度的设备,实际上它测量的是力与单位质量的乘积(F=ma)。通过这个传感器,我们可以测量重力的作用,例如当小车静止时,X轴读数为0g(重力加速度),而Y轴读数为-1g,因为垂直方向受到向下拉的力。然而,当小车倾斜时,X轴会读出正数,表示向下的倾斜,而Y轴读数会稍低,这是因为传感器感知到的重力减小了。尽管Y轴的敏感度相对较低,且不依赖于倾斜的方向,但在实际应用中,加速度计主要关注X轴的变化,因为它对角度变化的反应更为灵敏。
陀螺仪则是另一种核心传感器,它测量的是旋转速率或角速度。当小车静止时,陀螺仪的读数为零。当小车开始转动时,其读数会反映出旋转的方向,是正值代表顺时针旋转,负值则表示逆时针。陀螺仪的数据对于判断小车的姿态至关重要,因为它能实时监测并补偿小车的旋转偏差,确保其保持平衡。
从传感器数据获取到实际应用的过程,首先要通过模拟数字转换器(ADC)将这些模拟信号转化为数字信号,然后进行偏移和尺度调整。偏移可以通过简单的测量确定,比如最小和最大读数之间的范围,而尺度调整则涉及到根据特定的校准值来转换原始读数,使其在合适的范围内表示实际的物理量。
集成这两类传感器后,一种名为"TheBalanceFilter"的简单解决方案被提出,用于结合加速度计和陀螺仪的数据,以实现动态平衡控制。通过算法,系统可以实时计算出小车的姿态和运动状态,并据此做出相应的电机控制,如调整推力和扭力,使小车能够在没有外力干预的情况下保持平衡。
总结来说,自平衡小车的关键在于精确的传感器融合和算法处理。加速度计和陀螺仪提供了关于小车位置、速度和姿态的信息,而巧妙地利用这些数据,设计师能够创造出令人惊叹的平衡性能,不仅在机器人技术中有广泛应用,也对工程教育和创新思维产生了积极影响。
A bit more about the accelerometer…
If it was necessary to have an estimate of angle for 360º of rotation, having the Y-axis
measurement would be useful, but not necessary. With it, we could use trigonometry to find the
inverse tangent of the two axis readings and calculate the angle. Without it, we can still use sine
or cosine and the X-axis alone to figure out angle, since we know the magnitude of gravity. But
trig kills processor time and is non-linear, so if it can be avoided, it should.
For a balancing platform, the most important angles to measure are near vertical. If the platform
tilts more than 30º in either direction, there’s probably not much the controller can do other than
drive full speed to try to catch it. Within this window, we can use
small angle approximation
and the X-axis to save processor time and coding complexity:
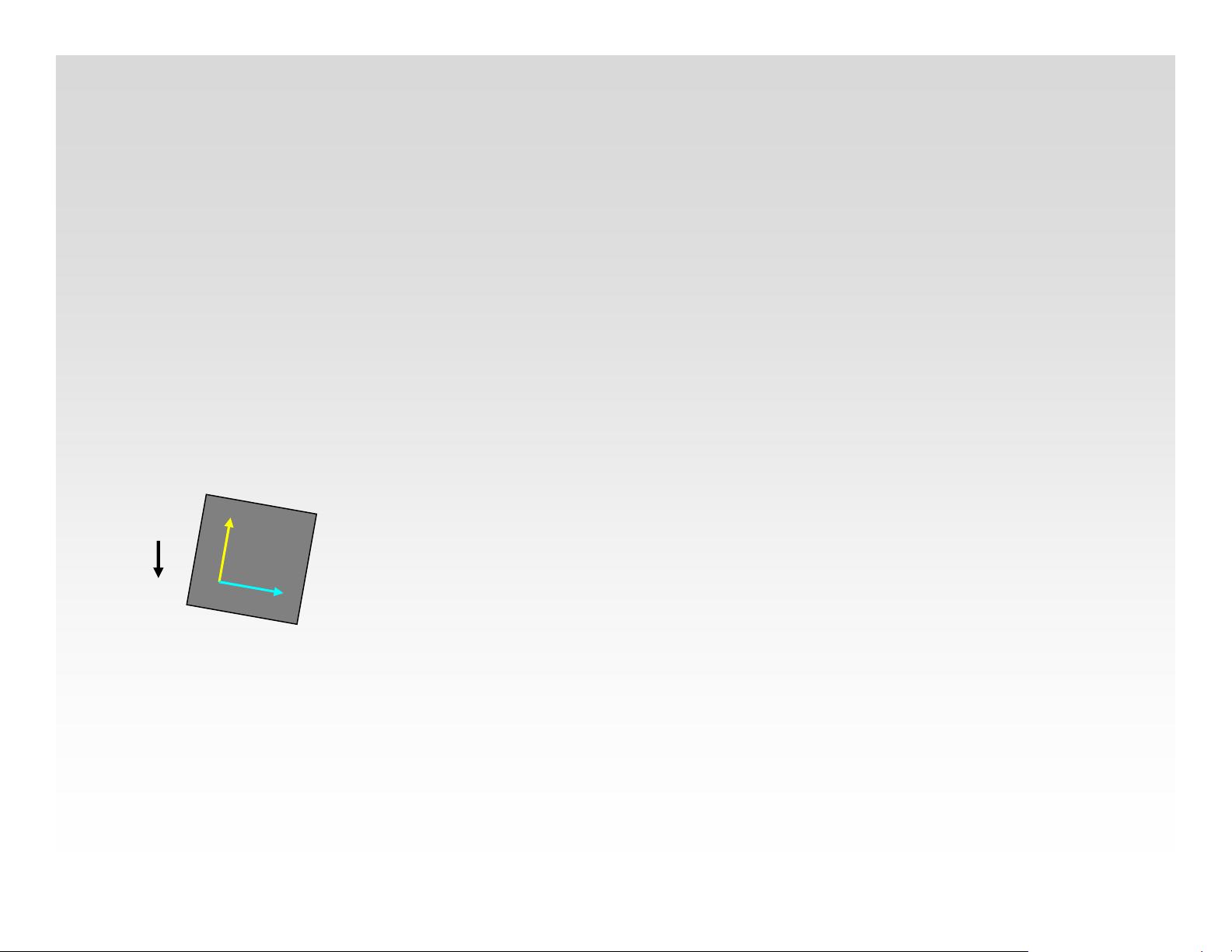
Y
X
g
Platform is tilted forward by and angle θ, but stationary (not accelerating
horizontally).
X-axis reads: (1g) × sin(
θ)
small angle approximation: sin(θ) ≈ θ, in radians
This works well (within 5%) up to θ = ±π/6 = ±30º.
So in the following bit of code,
x_acc = (float)(x_acc_ADC – x_acc_offset) * x_acc_scale;
x_acc will be the angle in radians if x_acc_scale is set to scale the output
to 1[g] when the X-axis is pointed straight downward.
To get the angle in
degrees, x_acc_scale should be multiplied by 180/π.
剩余19页未读,继续阅读
184 浏览量
2408 浏览量
1882 浏览量
117 浏览量
312 浏览量
261 浏览量
135 浏览量
628 浏览量

p270439277
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
