Kinco伺服电机驱动器参数设置详解
173 浏览量
更新于2024-08-26
收藏 887KB PDF 举报
"这篇文档是关于Kinco高分辨率两相伺服电机配套驱动器的参数设置说明,涵盖了速度环设定、励磁等相关参数调整,旨在帮助用户理解和优化伺服系统的性能。"
详细说明:
伺服驱动器是伺服系统的核心组件,用于控制伺服电机的运行,确保其在精度、速度和稳定性上达到最佳效果。在Kinco高分辨率两相伺服电机的配置中,正确设置驱动器参数至关重要。
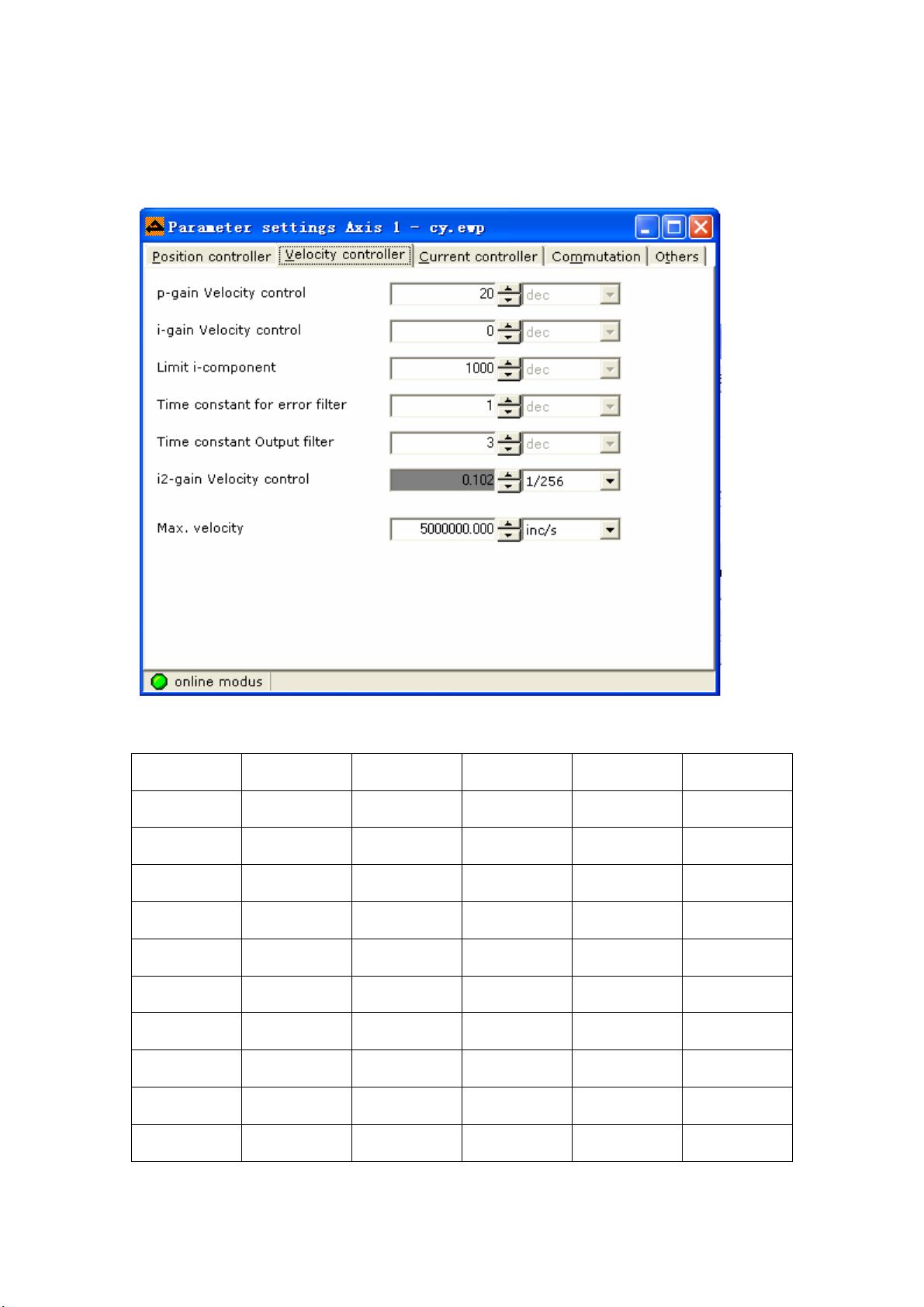
1. 速度环设定:
- zp-gain velocity control (速度环比例增益Kvp): 这个参数决定了速度环对速度误差的响应强度。根据表格,Kvp的设置取决于负载惯量与转子惯量的比例以及电机的机械钢度。例如,如果C值为250,JL/JM为1,则Kvp应设为10。
- E-Filter 和 O-Filter: 分别代表误差滤波器的时间常数和输出滤波器的时间常数,它们用于平滑电机运行中的波动,提高系统的稳定性和动态响应。
- zi-gain velocity control (速度环积分增益Kvi): Kvi的值会影响电机速度的稳定性和响应速度。在使用高分辨率编码器时,Kvi通常需要减小,如设置为0.1。
- zi2-gain velocity control: 是针对高分辨率编码器的特殊设置,其数值根据编码器分辨率进行相应调整。
2. 励磁(Communication):
- 励磁参数涉及到驱动器与电机之间的通信,确保电机获得正确的电流指令以产生所需扭矩。这部分可能包括设置通信协议、波特率和数据格式等,以保证数据传输的准确性和实时性。
3. 其他关键参数:
- Max.velocity: 最大速度限制,根据实际应用需求进行设置,以防止电机过速导致的潜在问题。
正确设置这些参数可以优化伺服电机的性能,包括提升定位精度、增强动态响应、减少振动和改善整体效率。在实践中,通常需要通过实验和调整来找到最佳的参数组合,以满足特定应用场景的需求。
此外,理解并掌握伺服驱动器的参数设置也涉及对伺服电机工作原理、电气特性以及负载特性的深入理解。这不仅有助于避免设备损坏,也能确保伺服系统在各种工况下都能表现出色。在进行参数调整时,应遵循制造商提供的指南,并结合实际情况进行微调。
高分辨率伺服电机 KINCO 伺服驱动器参数设置说明
一、速度环设定(Velocity controller)
z p-gain velocity control (速度环比例增益 kvp)要重新设置,设定值可参考如下表格
C[Nm/rad] JL/JM Kvp E-Filter O-Filter Kpp
>=250 1 10 1 1 80
5 10 1 1 80
10 12 1 1 80
15 16 1 2 80
30 40 1 5 70
100 70 1 7 70
80 5 10 1 1 60
10 12 1 1 60
30 20 1 2 60
100 40 1 7 60
下载后可阅读完整内容,剩余8页未读,立即下载
2019-09-25 上传
2012-06-14 上传
2019-10-12 上传
2019-09-20 上传
2019-11-01 上传
2019-10-13 上传
2023-11-06 上传
2019-10-11 上传
2021-03-20 上传

weixin_38663169
- 粉丝: 2
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
