RTCA DO-387-2021:交通监控EO/IR传感器系统MOPS标准
版权申诉
RTCA DO-387-2021.pdf 是一份由美国航空业标准化组织 RTCA, Inc. 出版的名为《交通监控领域电光/红外(EO/IR)传感器系统最小运行性能标准》(Minimum Operational Performance Standards for Electro-Optical/Infrared (EO/IR) Sensor Systems for Traffic Surveillance)的文档。该文件由 SC-228 特殊委员会编制,并于2021年6月17日得到了RTCA程序管理委员会(PMC)的批准。
RTCA是一个非盈利性机构,致力于推动航空和航空电子系统的进步,以公众利益为宗旨。作为一家标准制定组织,RTCA通过协商一致的方式提出关于现代航空问题的建议。其目标包括但不限于:
1. 协调航空系统用户和供应商的技术需求:RTCA确保用户和制造商之间的技术规格统一,以便于系统的互操作性和兼容性,提高整体行业的效率和安全性。
2. 制定行业标准:通过DO-387,RTCA提供了一套针对交通监控领域EO/IR传感器系统的具体标准,这些标准涵盖了系统设计、性能指标、测试方法以及维护要求等方面,旨在确保此类设备在实际应用中的可靠性和有效性。
3. 促进技术进步:通过对新技术的研究和评估,RTCA鼓励创新,同时确保新开发的EO/IR传感器系统满足或超过行业公认的最低性能标准,适应不断变化的交通监控环境。
4. 保障公共安全:通过严格的性能标准,RTCA确保了这些传感器系统的安全性能,从而降低了潜在的风险,比如误报、漏报或设备故障可能带来的交通事故隐患。
5. 文档获取与支持:该文档的副本可以通过RTCA的华盛顿DC办公室、电话、传真的方式获取,或者访问其官方网站rtca.org获取定价和订购信息。
总结来说,RTCA DO-387-2021.pdf文档是航空和交通监控领域的一项关键资源,为电光/红外传感器系统的开发者、运营商和监管机构提供了一个明确的技术框架,以实现高效、安全的交通监控解决方案。这份文档的发布和推广,对于提升整个行业的技术成熟度和法规遵从性具有重要意义。
2
© 2021 RTCA, Inc. DO-387
Section 5 contains an informative listing of SC-228 committee members who contributed
to these MOPS.
Appendix A contains information on the proposed wavelengths for the EO/IR equipment.
Appendix B contains methods and results of analysis and simulations that derive the
required minimum Declaration Ranges (DRs) for the EO/IR sensor system to alert the
remote pilot to maneuver to remain Detect and Avoid (DAA) Well Clear (DWC) for
different categories of intruders and different encounter geometries between the ownship
and intruders. Analysis focuses on encounters with non-cooperative aircraft.
Appendix C provides methods and results of analysis on the frequency of cases where an
intruder enters the EO/IR sensor system Field of Regard (FOR) within its Declaration
Range (DR) and provides validation of the EO/IR DR against DAA alerting requirements.
Appendix D provides results of simulations and measurements to estimate signatures of
different kinds of aircraft as guidance for EO/IR sensor system design against expected
intruders. It also provides guidance for justification of EO/IR sensor system performance.
Appendix E provides results of simulations that assess the sensitivity of safety metrics to
sensor system measurement errors and declaration range.
Appendix F describes a tracker that could be used in EO/IR sensor systems.
Appendix G provides a list of acronyms and abbreviations used in this document.
1.2 DAA System Overview
DAA systems are designed to provide UA the ability to remain well clear of and avoid
collisions with other aircraft (referred to herein as "intruders"). Two types of surveillance
equipment are identified for such a system: cooperative sensors such as Mode Select
(Mode S) active surveillance and Automatic Dependent Surveillance-Broadcast (ADS-B),
which rely on having compatible equipment in the intruder aircraft, and non-cooperative
sensors, which detect intruders without any equipage assumptions. The EO/IR sensor
system is a possible solution as the primary sensor for non-cooperative intruders.
Paragraphs 1.2.1 and 1.2.2 give an outline of the UA elements and the CS elements of a
DAA system.
The Federal Aviation Administration's (FAA's) UAS Operational Concept document
includes assumptions, constraints, requirements, and high-level operational considerations
for UAS, and is intended to provide the foundation for the DAA MOPS and DAA EO/IR
sensor system MOPS.
1
However, the scope and functionality of the DAA MOPS and DAA
EO/IR sensor system MOPS may require specific restrictions, operating limitations and/or
supplemental operational controls or provisions to achieve an acceptable level of collision
risk mitigation for use in the National Airspace System (NAS). Operating limitations for
EO/IR sensor system equipment compliant with these MOPS are documented in
Paragraph 1.2.4.
1.2.1 DAA System Description – Unmanned Aircraft
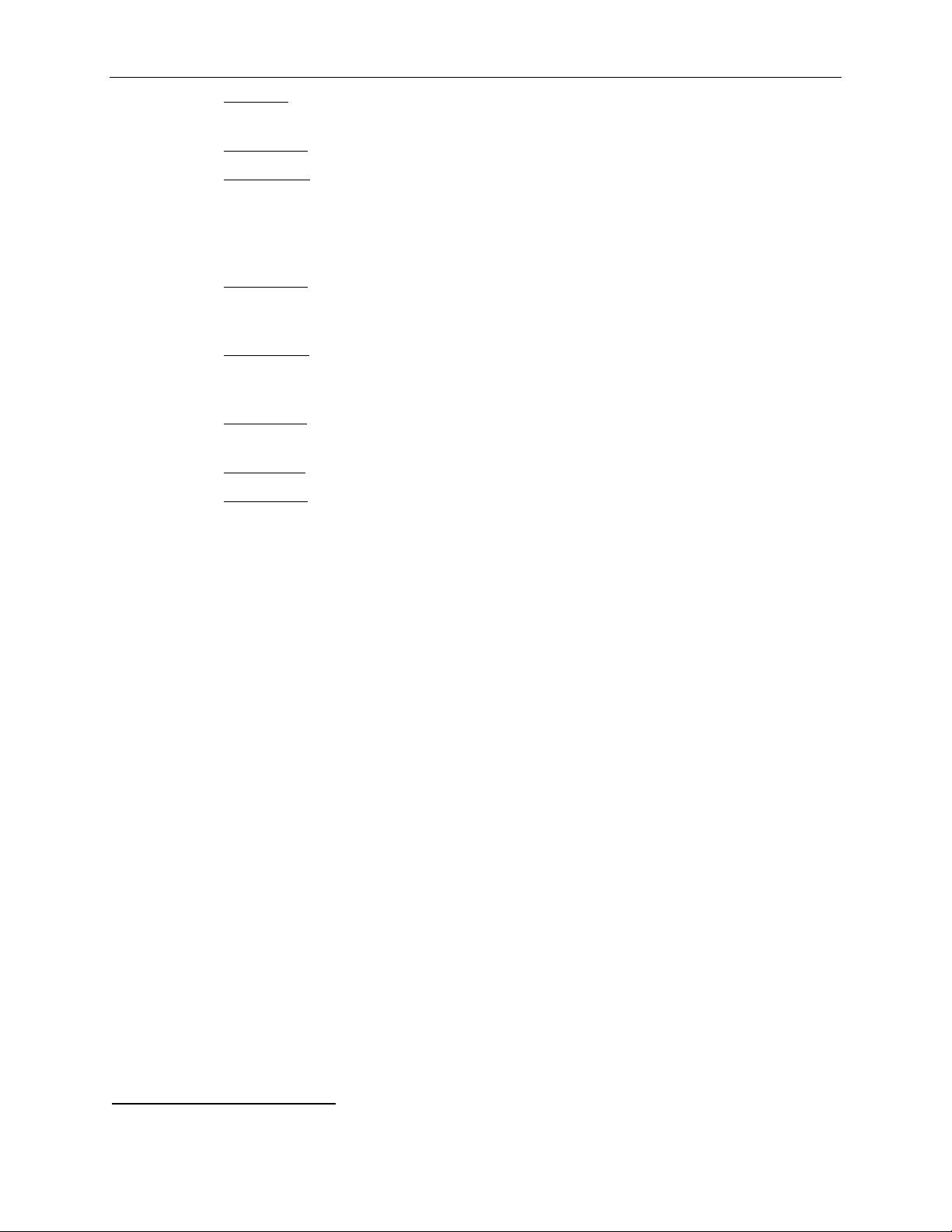
Figure 1-1 shows a simplified implementation of a DAA system onboard the aircraft, as
depicted in RTCA Document 365A (DO-365A). The EO/IR sensor system interacts mainly
with the UA DAA processor, which can be in the UA or in the CS. The EO/IR sensor
system sends the EO/IR generated tracks to the DAA processor, which creates unified
tracks that combine information from all sensors.
1
Federal Aviation Administration (FAA) Integration of Civil Unmanned Aircraft Systems (UAS) into the National
Airspace System (NAS), Second Edition, July 2018

剩余193页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-15 上传
2020-03-19 上传
2022-12-01 上传
2022-12-01 上传


深水潜游要憋气
- 粉丝: 1
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
