相关滤波目标跟踪算法深度解析与VOT评价
需积分: 31 164 浏览量
更新于2024-07-17
19
收藏 5.87MB PPT 举报
本资源详细探讨了相关滤波目标跟踪算法及其评价,特别关注于在视觉追踪无人机任务中的应用。首先,报告从视觉目标跟踪的基本概念入手,定义了其研究对象,即在不断变化的环境中,根据输入图像识别并跟踪特定目标。视觉目标跟踪面临诸如外观变形、光照变化、快速运动等因素的挑战,主要方法可以归为生成类(如卡尔曼滤波和mean-shift)和判别类(如Struck和TLD),其中判别类方法因其利用背景信息和机器学习而更受欢迎。
在具体算法方面,重点介绍了MOSSE(Minimum Output Sum of Squared Error)、KCF(Kernelized Correlation Filter)、DSST(Discriminative Scale Space Tracking)、FDSST(Fast Dense Sliding Window)和LCT(Linear Complementary Filter)等常用的相关滤波跟踪算法。这些算法的流程对比有助于理解它们在不同场景下的优势和局限性。作者提出了一个结合FDSST和LCT的新型长期跟踪算法,旨在提高跟踪的稳定性和准确性,尤其适用于无人机监控这类长期跟踪任务。
评价指标方面,OTB(Object Tracking Benchmark)和VOT(Visual Object Tracking Challenge)是两个重要的基准测试平台,用于评估目标跟踪算法的性能。OTB提供了多样化的场景和复杂度等级,而VOT则更注重实时性和鲁棒性。报告还提及了2013年发表在CVPR上的论文,它为在线目标跟踪设定了一个基准标准,强调了实时性能的重要性。
这份50页的PPT详细注释了每个部分,对于学习者准备毕业答辩、组会汇报或学术演讲极具价值,能够帮助读者深入理解目标跟踪算法的工作原理、性能比较以及如何改进现有方法。无论是初学者还是专业人士,都可以从中获得深入且实用的知识。
9
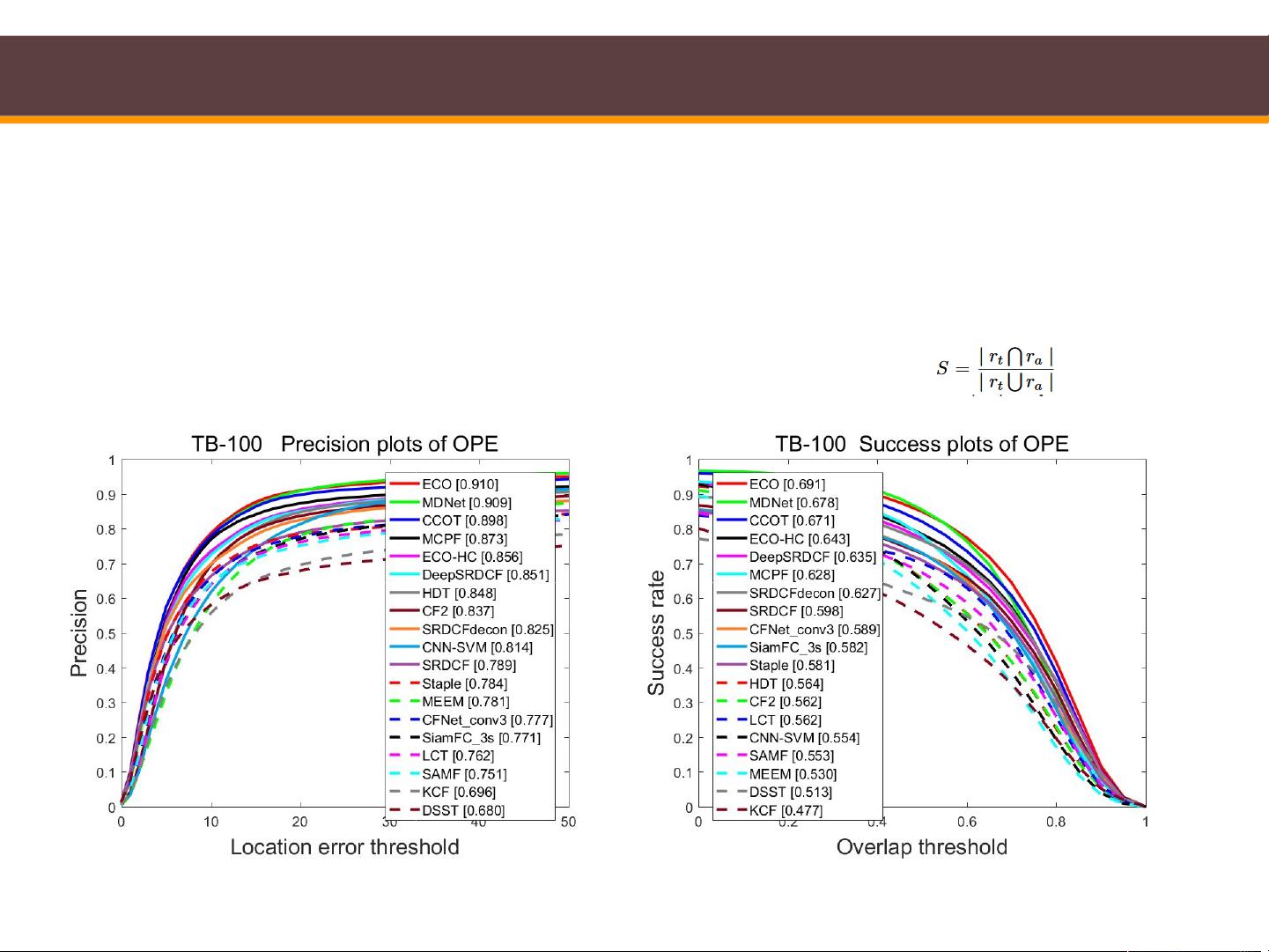
( 2 )评价方法
根据第一帧中用 ground-truth 的准确位置进行初始化,得到 "1
( 07 ,一次通过的评估):
801 :精确度图显示评估的位置在给定的准确值的阈值距离之内的帧数占
总帧数的百分比,文中使用 个像素点的分数阈值。
9)1 :预测目标所在 $! 的重合程度,定义重叠率
评价

剩余49页未读,继续阅读
370 浏览量
150 浏览量
215 浏览量
2019-09-13 上传
150 浏览量
137 浏览量
118 浏览量
118 浏览量
118 浏览量

MuXi_J
- 粉丝: 105
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- web-scraping-challenge
- 物料与仓储管理
- EJEMPLO-1
- 基于Arduino的MPU6050 DMP6自稳定平台
- discordbot:个人机器人不和谐,主要吐出QI引号
- SimEvents:运筹学库:SimEvents:registered: 的附加库,为运筹学系统建模提供模块。-matlab开发
- 美国,日本和越南的数据科学状况
- 库存管理技术
- dry-web-roda:Roda集成,适用于干式网络应用
- apache_2.4.4-x64-openssl-1.0.1yu.msi.zip
- 使用 MATLAB 进行算法交易 - 2010:来自 2010 年 11 月 18 日网络研讨会的文件。-matlab开发
- ootr_tracker_emotracker:时间随机化陶笛的物品追踪器
- XX餐饮用品制造公司仓库管理制度规范
- eb4j:EPWINGEbook访问库和实用程序
- Bon.az Extension-crx插件
- 电子功用-带内熔丝的高压电容器不平衡保护防扰动跳闸方法
