PID+重复控制器:单相逆变器复合控制方案
32 浏览量
更新于2024-08-30
收藏 247KB PDF 举报
"基于PID的单相逆变器复合控制方案设计"
本文探讨了一种结合PID控制器和重复控制器的单相逆变器控制策略,旨在优化系统性能并简化控制器设计。在传统的PID控制基础上,通过引入重复控制器,可以进一步提升系统的稳态精度和动态响应。
1. 逆变器模型
单相逆变器模型通常涉及输出电压u0、电感电流i、负载电阻R和滤波器电容C。逆变器的脉冲传递函数在离散化后能够描述其动态行为,有助于控制器的设计和分析。
2. PID控制器设计
PID控制器的主要目标是提高系统低频增益,减小稳态误差,同时保持系统的稳定性。设计过程中,通过设置适当的开环系数K,并引入滞后校正和超前校正,来增强低频响应、提高相角裕度、增大截止频率以及抑制高频噪声。这样设计的PID控制器能够提供良好的动态性能和稳态精度。
3. 重复控制器设计
重复控制器是基于内模控制原理设计的,其作用在于对外部周期性信号进行精确跟踪。在PID+控制对象闭环系统的基础上添加重复控制器,可以进一步减少稳态误差,特别是在处理周期性扰动时效果显著。重复控制器的离散表达式与采样频率和基波周期相关,确保对周期性信号的准确跟踪。
结合PID控制器和重复控制器的串联拓扑结构,该复合控制方案不仅提高了逆变器的稳态精度,还提升了动态性能,同时降低了控制器设计的复杂性。这种设计方法特别适用于需要高精度和快速响应的电力转换系统,如变频和逆变应用。通过合理选择控制器参数和系统配置,可以实现对逆变器输出电压的精确控制,同时抑制各种干扰,提高系统的鲁棒性。
基于基于PID的单相逆变器复合控制方案设计的单相逆变器复合控制方案设计[图图]
本文介绍了一种PID控制器与重复控制器采用串联拓扑结构的方案,将稳定的PID+控制对象闭环系统作为重复控
制器的控制对象,在保证系统稳态误差和动态性能的同时,简化了重复控制器的设计。
引言引言
本文介绍了一种PID控制器与重复控制器采用串联拓扑结构的方案,将稳定的PID+控制对象闭环系统作为重复控制器的控制对
象,在保证系统稳态误差和动态性能的同时,简化了重复控制器的设计。
1 逆变器模型逆变器模型
单相逆变器
式中,u0为输出电压;i 为电感电流; 为负载电阻;C为滤波器电容;£为电容等效串联电阻:
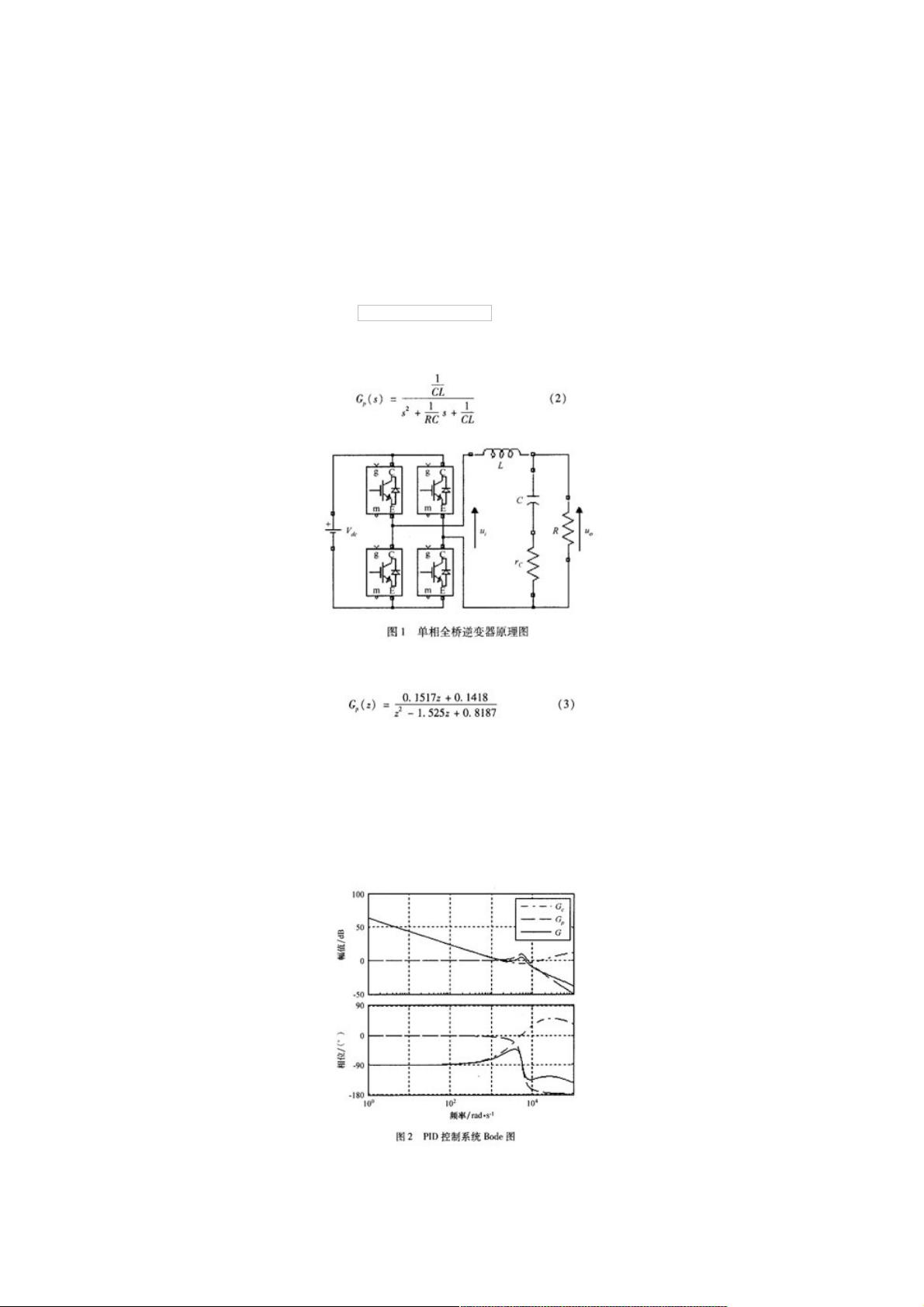
取采样频率和开关频率相等,把逆变桥看作一个零阶保持器,将式(2)离散化可得对象的脉冲传递函数为:
2 PID控制器设计控制器设计
图2所示为PID控制系统的开环频率特性图(Bode图)。其中,G0为被控对象;G 为PID控制器;G=Gp×G0
按照传统PID设计理论,首先设开环系数为K=200,目的是提高系统低频增益,减小稳态误差。但是K值过大会降低系统稳定
性,所以在低频段 处加一零点,与积分环节构成滞后校正。该滞后环节的作用主要有两条:一是在保证系统暂态性能基本不
变的情况下,提高系统低频响应的增益,减小系统的稳态误差;二是利用其低通滤波特性衰减系统高频响应增益,提高系统的
相角裕度,以改善系统的稳定性。
在中频段60 处加一零点,同时在高频段 处加一极点,由此构成超前校正。其作用主要有两条:一是利用相角超前特性增大系
统的相角裕度,提高系统的截止频率,保证系统快速的动态响应;二是衰减系统高频响应增益,抑制高频噪声,提高系统鲁棒
性。
图2中G为PID控制系统开环传递函数,由其频率特性曲线可以看到,系统低频开环增益非常大;截止频率附近频段相角裕度增
下载后可阅读完整内容,剩余3页未读,立即下载
140 浏览量
148 浏览量
267 浏览量
226 浏览量
166 浏览量
528 浏览量
2024-11-08 上传
273 浏览量
2025-01-06 上传

weixin_38692707
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
