C51单片机控制伺服电机技术解析
178 浏览量
更新于2024-08-04
1
收藏 388KB PPT 举报
"本资源为单片机控制伺服电机的PPT课件,主要讲解了如何利用C语言编程和C51单片机的输入/输出接口来控制伺服电机。内容涵盖了单片机I/O口的工作原理、伺服电机控制信号的时序以及具体的编程实例。"
单片机输出接口与伺服电机控制是电子工程领域中的一个重要话题,特别是在自动化设备和机器人技术中。C51单片机是一种广泛应用的8位微控制器,其具有多个并行I/O口,如P0、P1、P2和P3,这些接口可以灵活地进行输入或输出操作。在控制伺服电机时,单片机通过输出特定频率和宽度的脉冲信号来调节电机的转速和方向。
伺服电机是一种能够精确控制角位置、速度和加速度的电机,常用于需要高精度定位的应用。在本课件中,伺服电机的控制信号主要通过P1_0和P1_1引脚来实现,其中P1_0控制右轮伺服电机,P1_1控制左轮伺服电机。通过改变P1_0和P1_1的高低电平状态,并配合不同的延迟时间,可以实现伺服电机的停止、顺时针全速旋转和逆时针全速旋转等操作。
例如,当P1_0输出高电平1.3ms后变为低电平,随后保持20ms低电平,伺服电机将停止转动。如果高电平时间增加到1.5ms,电机将顺时针全速旋转,而1.7ms则使其逆时针全速旋转。这种控制方法基于脉冲宽度调制(PWM),通过调整脉冲宽度来控制电机的转速。
在任务一中,还提供了一个使用BoeBot库和串口通信的示例代码,使得可以通过串口指令控制两个轮子全速旋转。首先初始化串口,然后通过P1_0和P1_1的高电平输出,使两个伺服电机同时全速旋转。
这个PPT课件详细介绍了单片机如何通过C语言编程和I/O接口控制伺服电机,提供了理论知识和实践案例,对于学习单片机控制伺服电机的初学者来说是非常有价值的参考资料。通过学习这些内容,读者可以理解并掌握单片机控制伺服电机的基本原理和编程技巧,为进一步开发自动化系统或机器人项目打下基础。
C51单片机的输入/输出接口
•
控制机器人伺服电机以不同速度运动
是通过让单片机的输入/输出(I/O)口
输出不同的脉冲序列来实现的。51系
列单片机有4个8位的并行I/O口:P0、
P1、P2和P3。这4个接口,既可以作
为输入,也可以作为输出;可按8位处
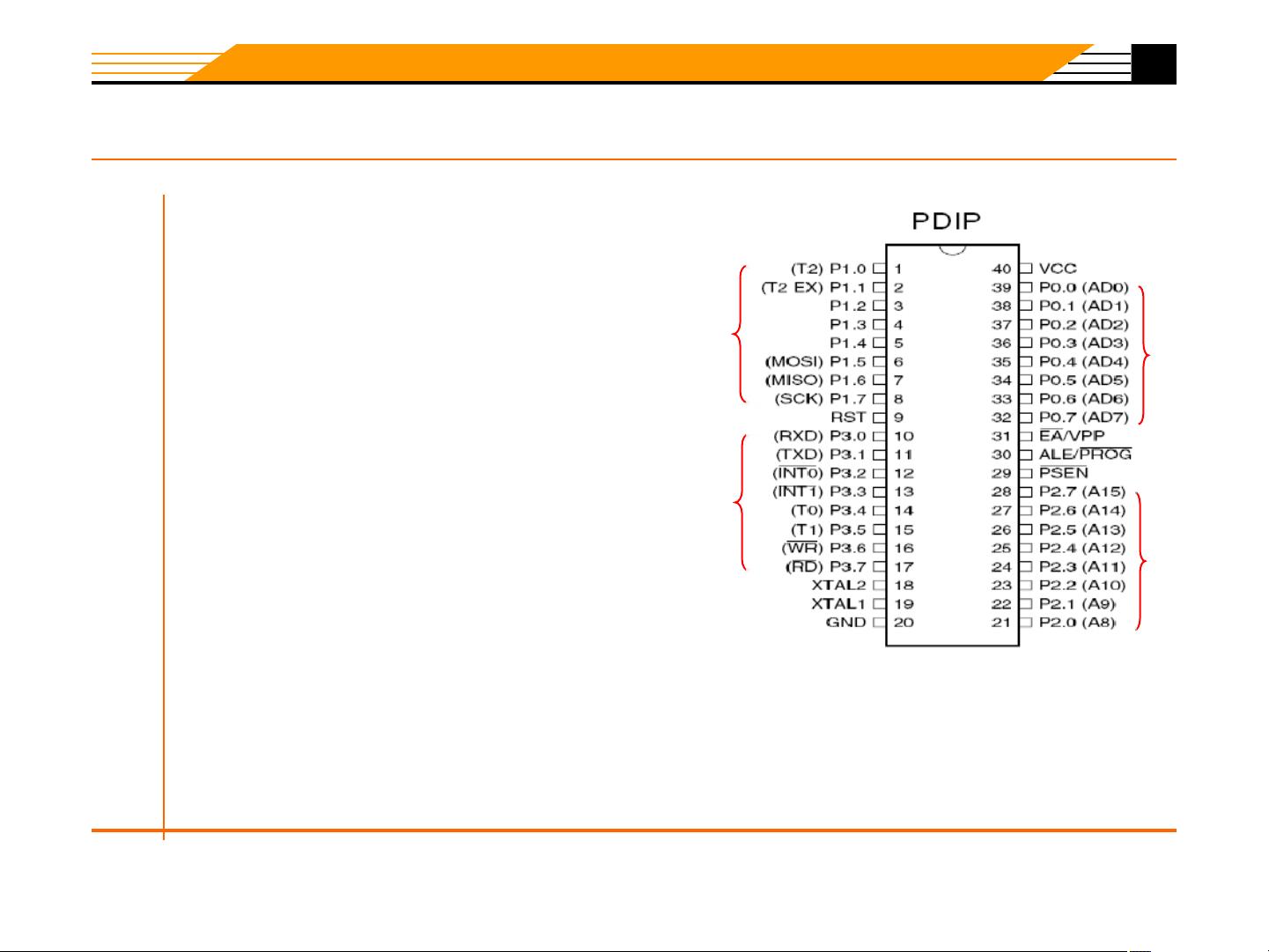
理,也可按位方式(1位)使用。右图
是单片机STC89C52RC的引脚定义
图,这是一个标准的40引脚双列直插
式集成电路芯片。
3.
剩余10页未读,继续阅读
2022-12-03 上传
2022-11-14 上传
2021-10-07 上传
2021-10-02 上传
2023-07-30 上传
2022-11-15 上传
2021-10-11 上传
2021-10-09 上传
2021-10-09 上传

matlab大师
- 粉丝: 2736
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
