ABB Robotstudio仿真软件项目操作指南
版权申诉
198 浏览量
更新于2024-07-10
收藏 13.75MB DOCX 举报
"该文档是关于ABBRobotstudio仿真软件的项目式使用说明,涵盖了三个主要项目:焊接机器人、搬运机器人和叉车搬运。详细步骤包括了如何新建工作站、选择和配置ABB机器人模型、导入设备、创建路径、示教点、同步到VC、设置I/O信号、事件管理和仿真录像等操作。"
在ABBRobotstudio仿真软件中,用户可以按照项目化的流程进行机器人编程和仿真。首先,我们来看第一个项目——焊接机器人。在这个项目中,用户需要:
1. 打开软件并新建一个空工作站,保存工作进度。
2. 选择合适的ABB机器人模型,例如IRB1600,设置相应的承重能力和到达距离。
3. 导入必要的设备,如焊枪(Binzelair22),并将其安装在机器人法兰盘上。
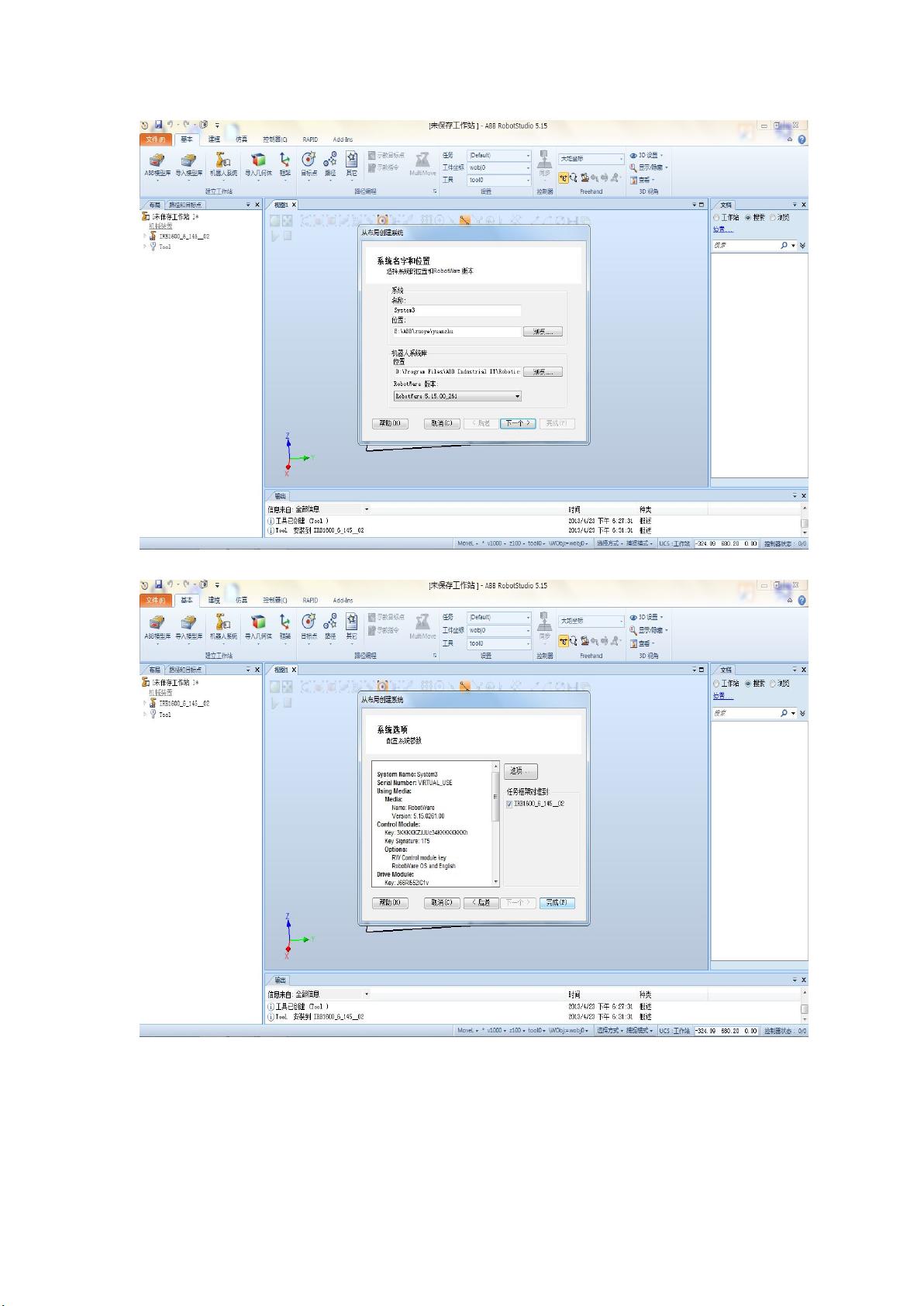
4. 使用建模工具创建矩形体作为工件,然后通过“从布局创建系统”构建机器人系统。
5. 创建路径,通过设置moveJ指令、速度和加速度参数。
6. 激活路径,进行示教点操作,使机器人沿着矩形的四个角点移动。
7. 同步到Virtual Controller(VC),将路径添加到主队列,设置仿真设定,最后进行仿真录像。
第二个项目是搬运机器人,步骤类似,但涉及到不同的设备和操作:
1. 新建工作站,导入IRB4600机器人,设置承重,创建圆柱体作为工件。
2. 可以通过设定颜色来区分不同的物体。
3. 建立机器人系统,配置I/O单元,包括新建Unit和信号do1、do2。
4. 在事件管理器中添加事件,用于在特定位置触发逻辑指令。
5. 示教路径,插入逻辑指令,同步到VC,进行仿真。
最后一个项目是叉车搬运,步骤也大同小异:
1. 新建工作站,导入IRB4600模型,导入所需的几何体(如托盘)。
2. 利用平移和旋转指令调整几何体的位置。
3. 配置和示教路径,同步到VC,设置仿真设定,进行仿真。
通过这些详细的步骤,用户能够逐步掌握ABBRobotstudio的使用方法,实现不同任务的机器人模拟操作,从而在实际应用中提高效率和准确性。
9
8
6.控制器启动完成后,选择路径-创建一个空路径,
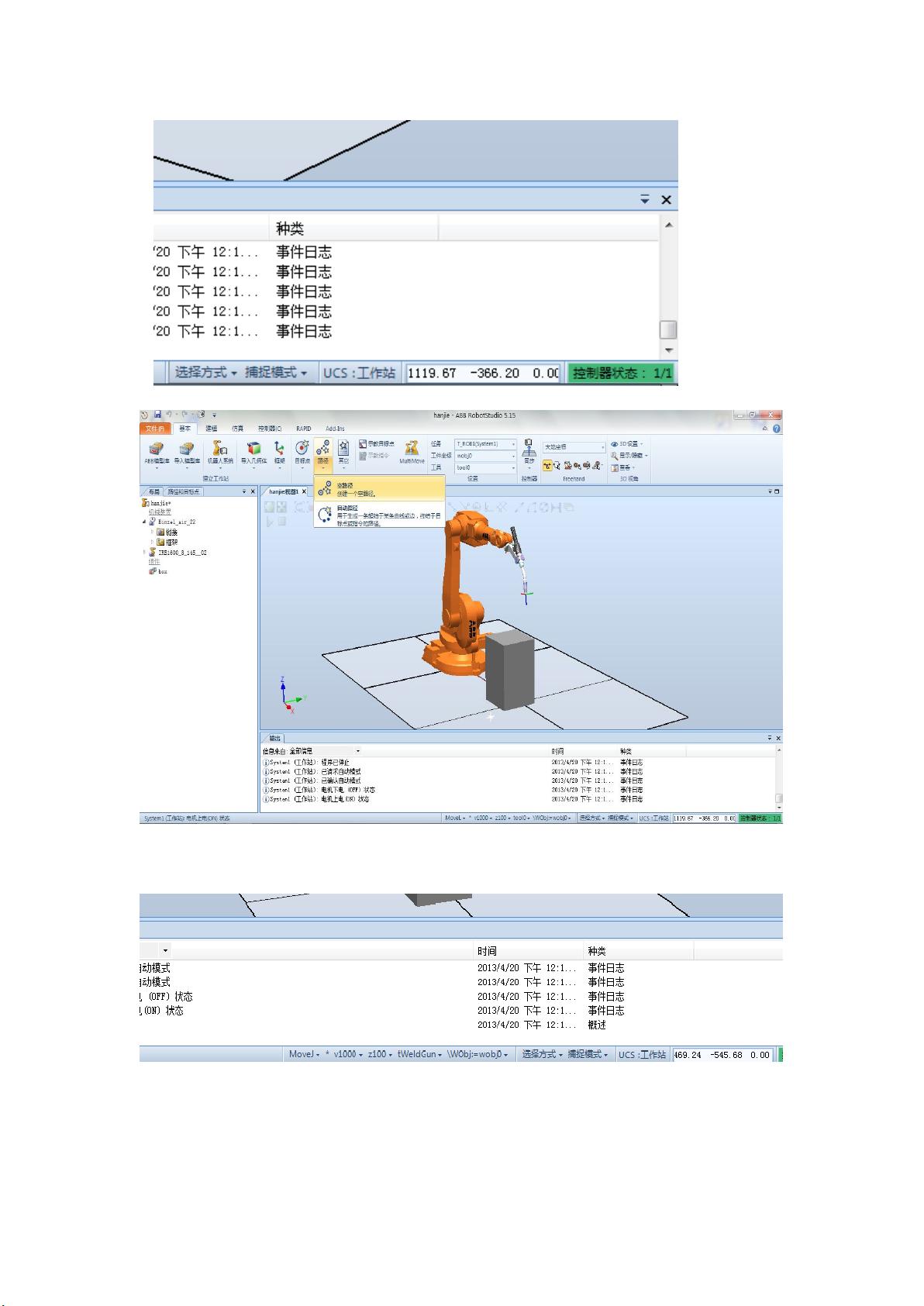
剩余47页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-04 上传
889 浏览量
987 浏览量
点击了解资源详情

xiaowu0912
- 粉丝: 0
- 资源: 13万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
