HSR-JR612六轴机器人II型示教器操作与编程详解
版权申诉
142 浏览量
更新于2024-06-20
收藏 8.12MB PPT 举报
华中数控二型示教器操作与编程的PPT详细介绍了HSR-JR612六轴机器人在工业生产中的操作与编程方法。该控制系统主要包括控制器HPC-102和示教器HSpad,它们之间通过以太网进行通讯。控制器负责管理机器人的伺服驱动器、输入输出等核心设备,而示教器则作为上位机,允许用户进行直接操作。
主要内容包括:
1. 工业机器人控制系统介绍:HSR-JR612的控制系统由控制器和示教器构成,控制器安装在机器人电柜内,示教器通过电缆连接至电柜,用于与控制器交互。
2. 示教器功能:
- 手动控制:用户可以直接控制机器人的运动,实现精确的定位和操作。
- 程序示教编程:用户可以通过HSpad创建、编辑和存储机器人动作程序,以便自动化生产线的操作。
- 自动运行:程序编写完成后,可以设定条件让机器人按预设路径执行任务。
- 运行状态监控:实时监控机器人运行状况,便于及时发现问题并调整。
- 系统参数查看:提供对机器人硬件和软件状态的查阅,确保系统正常运行。
3. 工业机器人结构与坐标系:
- 六轴机器人有定位关节(A1、A2、A3)和定向关节(A4、A5、A6),其中关节轴遵循特定规则(例如右手法则)。
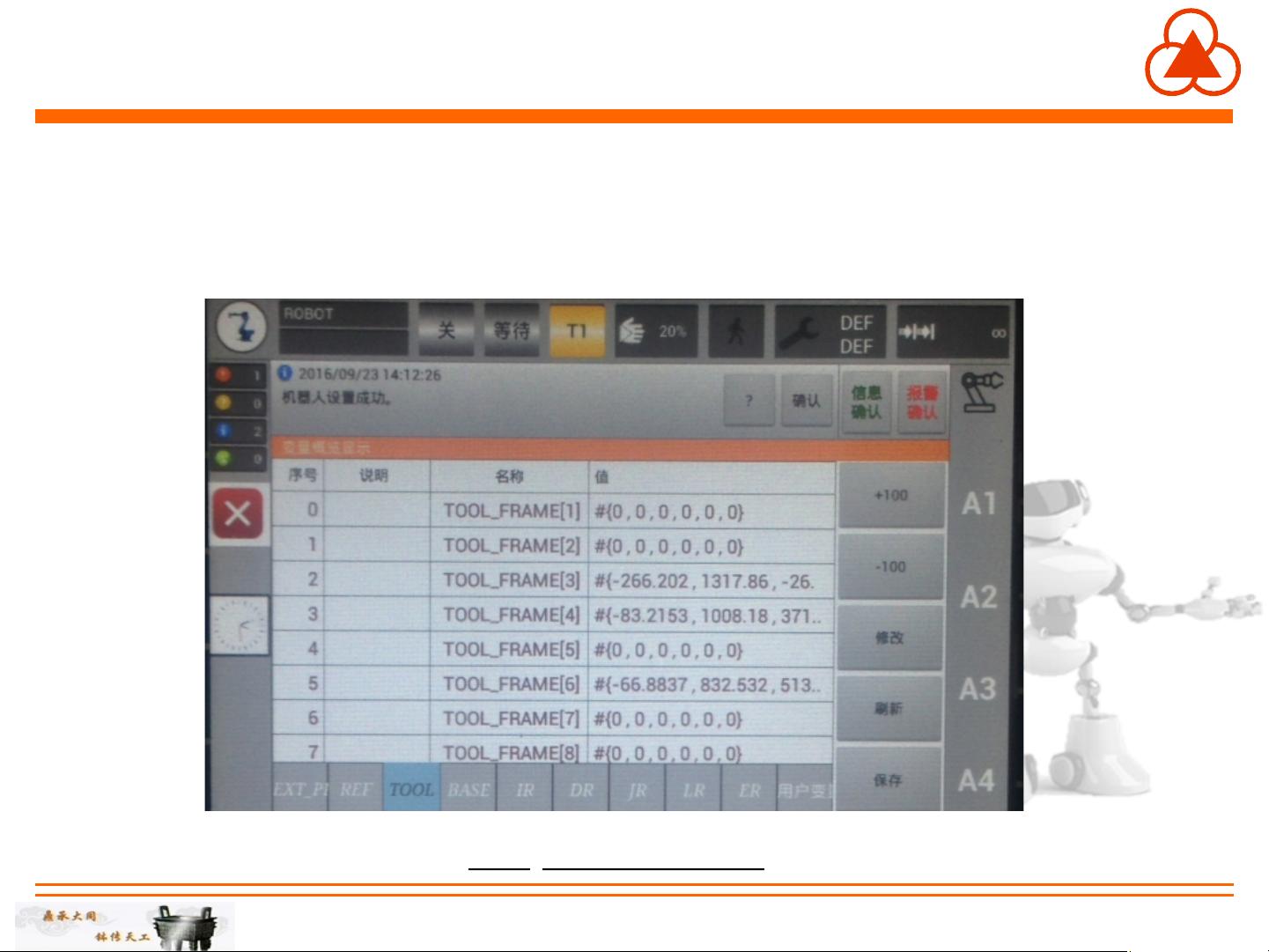
- 坐标系定义:采用标准D-H法则,基坐标系以A1和A2关节轴线的交点为原点,工具坐标系位于工具的工作点,可以根据需求进行调整。
4. 坐标系概念:
- 机器人默认坐标系:固定在机器人底部,反映机器人相对于世界的初始位置。
- 世界坐标系:一个固定的参照系,是所有其他坐标系的基准,通常与默认坐标系一致。
- 基坐标系:描述工件位置,可独立调整,与默认坐标系同步或不同步。
- 工具坐标系:随工具移动,反映工具工作点的位置,用户需要根据任务需要将其放置在合适位置。
掌握这些操作和编程技巧对于工业机器人维护人员、工程师以及操作员来说至关重要,能够确保机器人在生产环境中高效、安全地执行任务。通过二型示教器,用户可以灵活地进行机器人操作的调整和程序设计,提高工作效率和产品质量。
工业机器人操作与编程
Ⅱ型示教器操作与编程
标签项 说明
6
模式状态显示。
模式可以通过钥匙开关设置,模式可设置为手动模式、自动模式、外部模式
。
7
倍率修调显示。
切换模式时会显示当前模式的倍率修调值。
触摸会打开设置窗口,可通过加/减键以 1%的单位进行加减设置,也可通过
滑块左右拖动设置。
8
程序运行方式状态。
在自动运行模式下只能是连续运行,手动 T1 和手动 T2 模式下可设置为单
步或连续运行。
触摸会打开设置窗口,在手动 T1 和手动 T2 模式下可点击连续/单步按钮进
行运行方式切换。
9
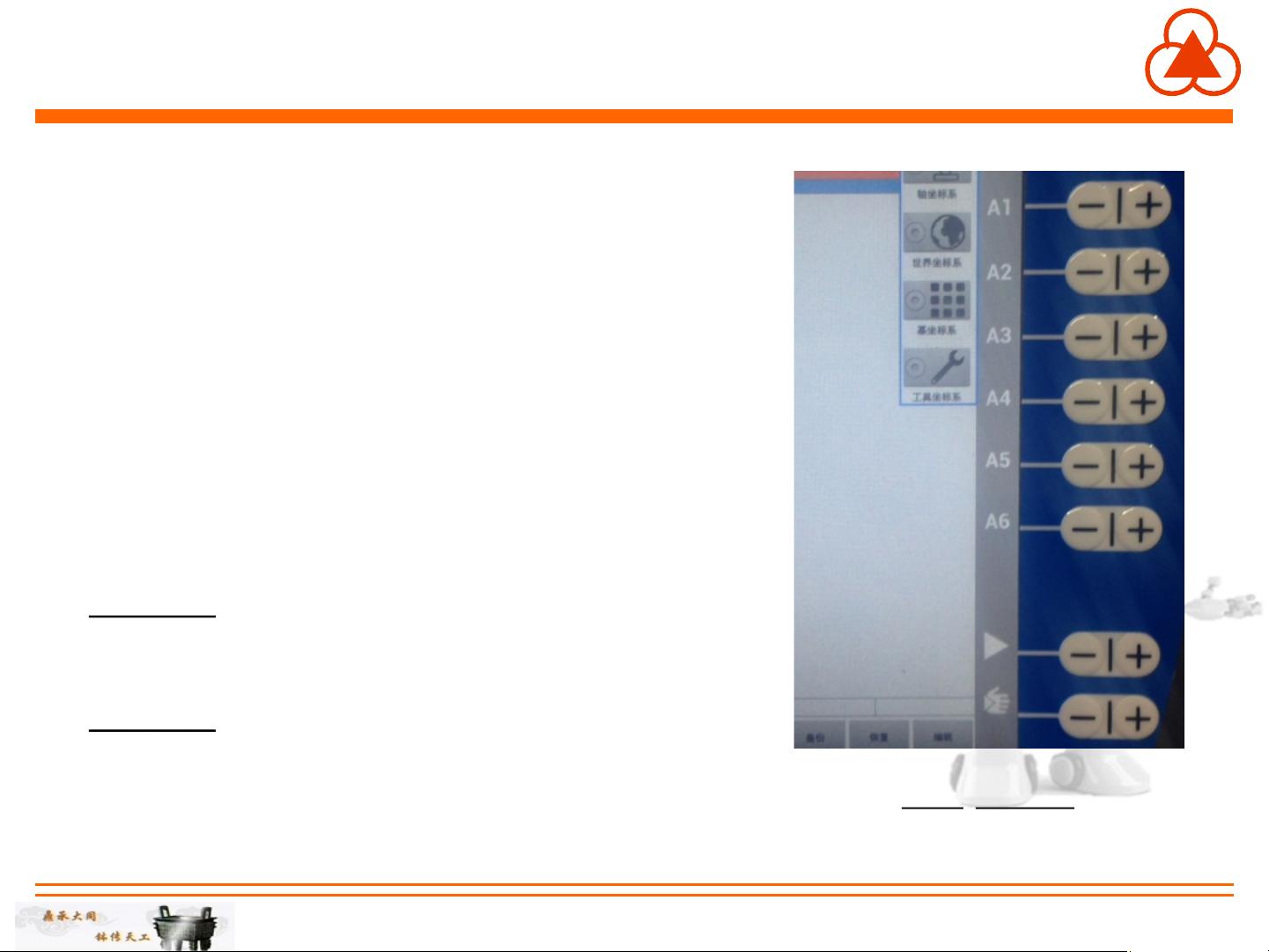
激活基坐标/工具显示。
触摸会打开窗口,点击工具和基坐标选择相应的工具和基坐标进行设置。
10
增量模式显示。
在手动 T1 或者手动 T2 模式下触摸可打开窗口,点击相应的选项设置增量
模式。

剩余80页未读,继续阅读
2021-09-19 上传
2021-09-19 上传
2024-04-24 上传
2021-10-01 上传
2021-09-19 上传
2021-09-19 上传

南抖北快东卫
- 粉丝: 78
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
