1982年Barnard与Fischler的计算立体深度感知综述
需积分: 9 138 浏览量
更新于2024-07-17
收藏 1.76MB PDF 举报
Barnard和Fischer于1982年在《ACM Computing Surveys》上发表了题为"Computational Stereo"的重要论文,这标志着深度感知在计算机视觉领域中的一个里程碑。他们将计算立体视(Computational Stereo)定义为从多视角图像中恢复场景的三维特性,这是一个核心问题,对于机器理解世界具有关键作用。
论文首先阐述了计算立体视的基本概念,包括图像获取、相机建模、特征提取、图像匹配、深度确定以及插值等各个环节。这些步骤是实现立体匹配和深度估计的基础,它们紧密协作,共同构建出场景的三维重建。与单眼技术相比,立体视提供了更直接、明确且定量的深度测量,尤其适用于那些雷达和激光测距等“主动”方法无法或不适合应用的场景。
作者着重讨论了评估不同计算立体技术有效性的关键标准,例如精度、鲁棒性、计算效率以及对光照变化和纹理相似度的处理能力。这些标准对实际应用中的性能至关重要,有助于研究人员优化算法并选择最适合特定任务的方法。
此外,论文还对当时计算立体研究进行了广泛而深入的概述,列举了一系列代表性的工作和研究成果,展示了当时在匹配算法、深度估计算法、多视图几何等方面的主要进展。这些研究不仅推动了计算机视觉领域的技术进步,也为后续的深度学习和立体视觉技术奠定了基础。
Barnard和Fischer的这篇论文不仅梳理了计算立体视的基本理论和技术,还为评价和选择立体深度感知技术提供了一个框架,对后续的研究者来说,是一份宝贵的参考文献。随着技术的发展,该领域的研究不断深化,但这篇文章在1982年的贡献仍然具有历史意义,对于理解和掌握早期计算机视觉中的深度重建方法具有重要的参考价值。
556 • S. T. Barnard and M. A. Fischler
HIGH
OBLIQUE
HIGH
OBLIQUE
OBLIQUE
r ~ OBLIQUE
VERTICAL ~
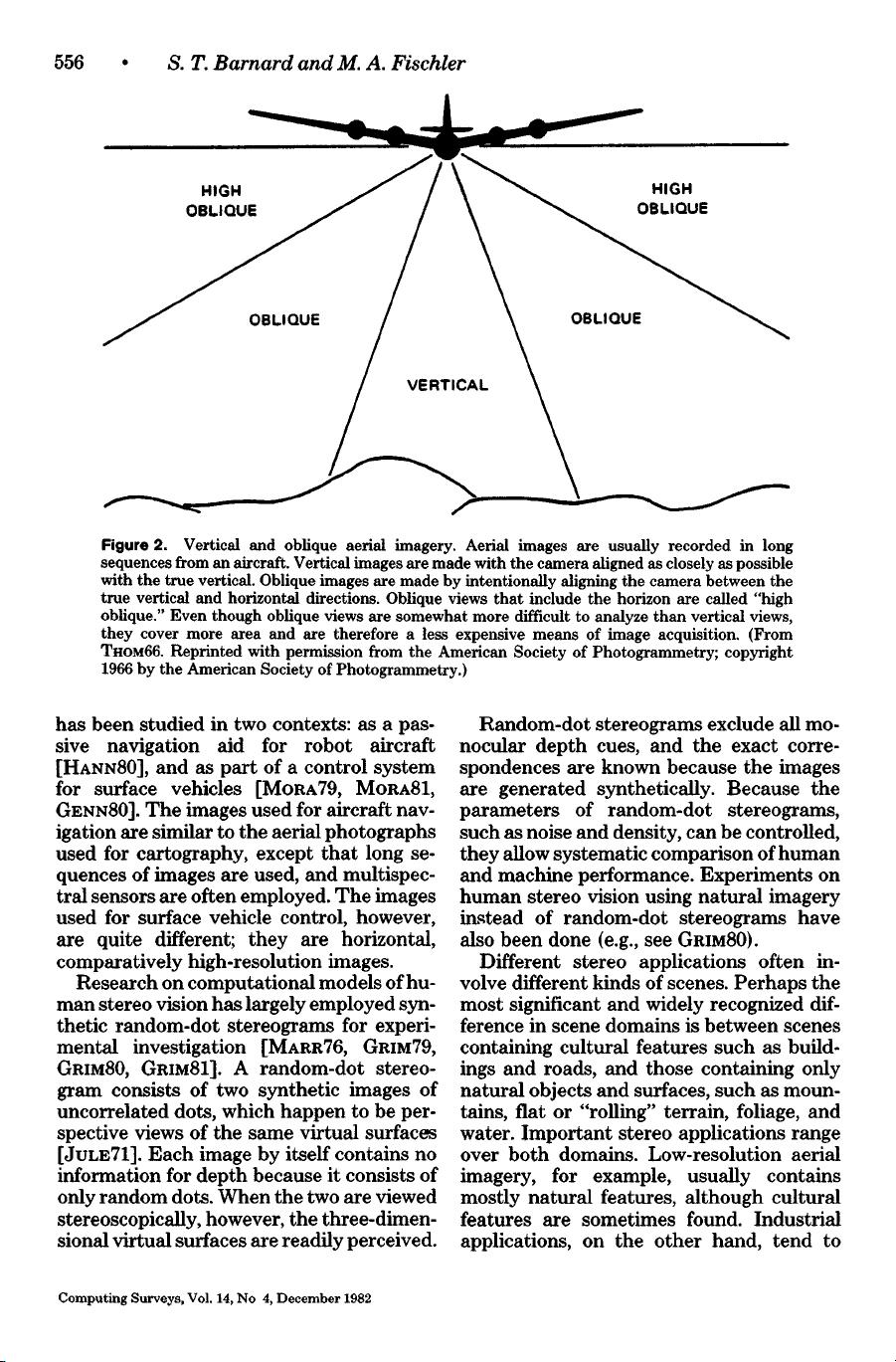
Figure
2. Vertical and oblique aerial imagery. Aerial images are usually recorded in long
sequences f~om an aircraft. Vertical images are made with the camera aligned as closely as possible
with the true vertical. Oblique images are made by intentionally aligning the camera between the
true vertical and horizontal directions. Oblique views that include the horizon are called
"ldgh
oblique." Even though oblique views are somewhat more difficult to analyze than vertical views,
they cover more area and are therefore a less expensive means of image acquisition. (From
THOM66. Reprinted with permission from the American Society of Photogrammetry; copyright
1966 by the American Society of Photogrammetry.)
has been studied in two contexts: as a pas-
sive navigation aid for robot aircraft
[HANN80], and as part of a control system
for surface vehicles [MORA79, MORAS1,
GESNS0]. The images used for aircraft nav-
igation are similar to the aerial photographs
used for cartography, except that long se-
quences of images are used, and multispec-
tral sensors are often employed. The images
used for surface vehicle control, however,
are quite different; they are horizontal,
comparatively high-resolution images.
Research on computational models of hu-
man stereo vision has largely employed syn-
thetic random-dot stereograms for experi-
mental investigation [MARR76, GRIM79,
GRIM80, GRIMS1]. A random-dot stereo-
gram consists of two synthetic images of
uncorrelated dots, which happen to be per-
spective views of the same virtual surfaces
[JULE71]. Each image by itself contains no
information for depth because it consists of
only random dots. When the two are viewed
stereoscopically, however, the three-dimen-
sional virtual surfaces are readily perceived.
Random-dot stereograms exclude all mo-
nocular depth cues, and the exact corre-
spondences are known because the images
are generated synthetically. Because the
parameters of random-dot stereograms,
such as noise and density, can be controlled,
they allow systematic comparison of human
and machine performance. Experiments on
human stereo vision using natural imagery
instead of random-dot stereograms have
also been done (e.g., see GRIM80).
Different stereo applications often in-
volve different kinds of scenes. Perhaps the
most significant and widely recognized dif-
ference in scene domains is between scenes
containing cultural features such as build-
ings and roads, and those containing only
natural objects and surfaces, such as moun-
tains, flat or "rolling" terrain, foliage, and
water. Important stereo applications range
over both domains. Low-resolution aerial
imagery, for example, usually contains
mostly natural features, although cultural
features are sometimes found. Industrial
applications, on the other hand, tend to
Computing Surveys, Vol. 14, No 4, December 1982
剩余19页未读,继续阅读
325 浏览量
2021-05-19 上传
2021-05-23 上传
2021-04-28 上传
193 浏览量
218 浏览量
点击了解资源详情
点击了解资源详情
345 浏览量

天堂草原天行健
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
