电机测速算法详解:M法、T法与MT法原理及误差分析
需积分: 45 70 浏览量
更新于2024-08-26
6
收藏 294KB PDF 举报
电机编码器测速算法是一种常见的电机性能检测技术,主要包含三种方法:M法、T法和MT法。这里我们重点讨论M法和T法。
M法(频率法):M法的基本原理是在一定的时间周期\( T_c \)内,通过计数编码器输出的脉冲个数\( M_1 \),计算出脉冲的频率\( f_1 = \frac{M_1}{T_c} \)。电机转一圈会产生\( Z \)个脉冲,通常\( Z \)等于编码器线数的4倍,因为A相和B相的上升沿和下降沿同时采集,实现4倍频。单位时间内电机转速\( n \)可以通过\( n = \frac{f_1}{Z} \times 60 \)得出,这里乘以60是因为将频率转换为每分钟转速。M法的优点是简单易行,但其分辨率取决于\( Z \)和\( T_c \),增大这两个值可提高精度,但受限于硬件条件。最大误差与脉冲个数成反比,适用于高速度测量,误差率高时则不适合低速应用。
T法(周期法):T法则是通过测量编码器两个脉冲之间的间隔\( T_t = \frac{M_2}{f_0} \)来计算转速,其中\( f_0 \)是高频时钟脉冲的频率。转速\( n \)为\( n = \frac{60}{ZT_t} \)。T法的分辨率\( Q \)与转速有直接关系,转速越低,分辨率越高,适合低速精确测量。最大误差同样与相邻脉冲数差有关。
M法和T法各有优缺点,M法简单但对低速精度有限,而T法则具有较好的分辨率但计算过程可能会复杂一些。MT法则是M法和T法的结合,通过结合两者的优点,可以在不同速度范围内提供更好的性能。在实际应用中,选择哪种方法取决于具体的需求,如精度、成本、实时性等因素。对于电机控制系统的设计师来说,理解这些测速原理并根据实际情况调整算法参数至关重要。
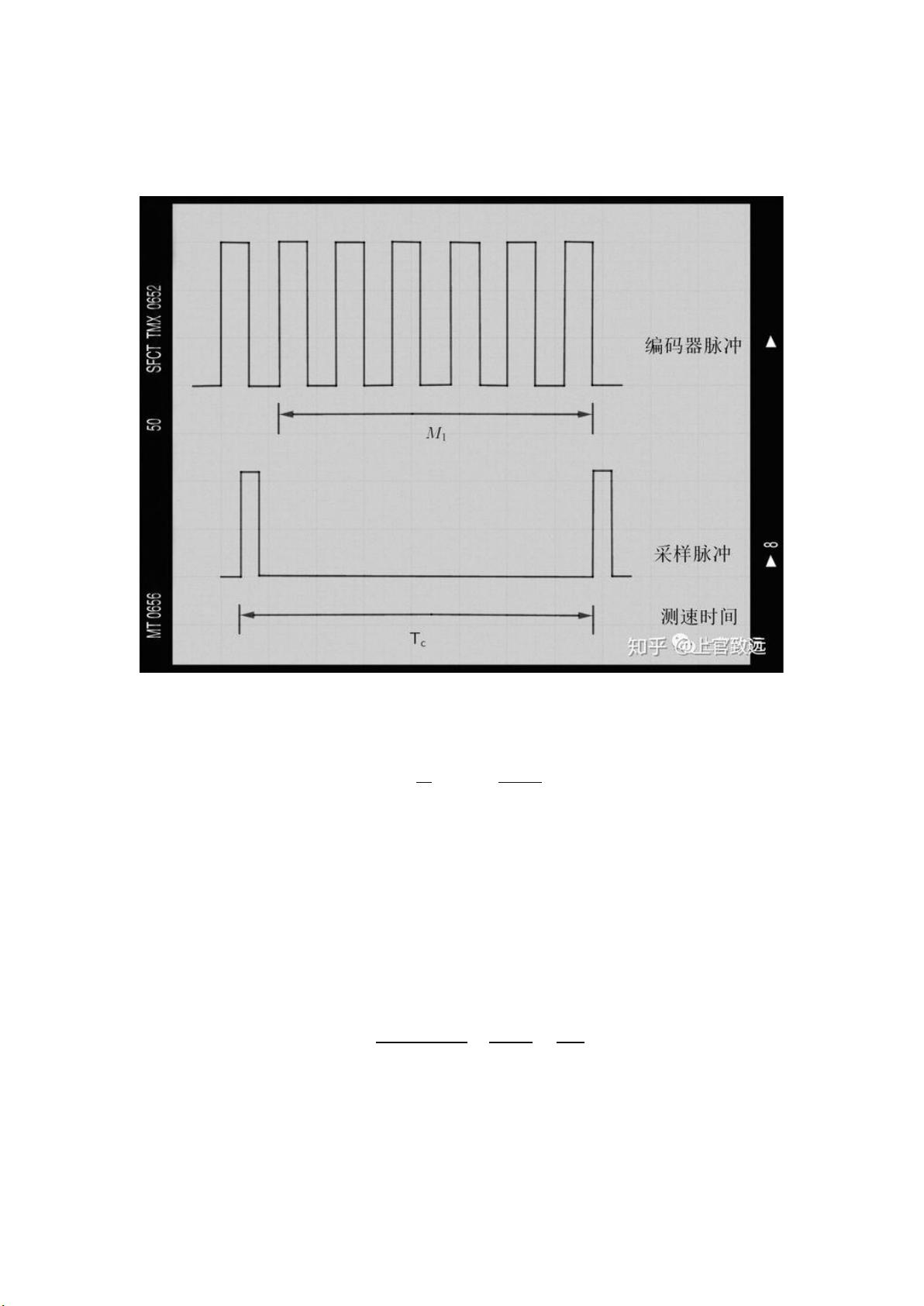
M 法在一定的时间周期 Tc 内,测量编码器输出的脉冲个数 M1 来计算转
速。用个数除以时间就可以得到编码器输出脉冲的频率(时间周期 Tc 除以脉冲
个数 M1 得到每一个脉冲的时间),因此 M 法也称为频率法,f1=M1/Tc。
假设电机转动一圈可以产生 Z 个脉冲,Z = 4 x 编码器线数,这里的 4 表
示 4 倍频,因为一般同时采集 A 相和 B 相的上升沿和下降沿。用频率 f1 除
以一圈的脉冲个数 Z 就得到单位时间内电机的转速:
转速的单位为 r/min,因此后面乘上了一个 60 ,表示 60 秒,也就是一分钟。
一般 Z 和 Tc 为常数,转速与计数脉冲个数 M 成正比,因此这种测速方法被
形象的称为 M 法。
当计数值由 M1 变为 M1+1 时,转速由 60 M1/ZxTc 变为 60(M1+1)/ZxTc ,
因此 M 法的分辨率可以这样计算:
可以看出,M 法测速的分辨率与速度无关,要提高分辨率,即减小 Q 值,必
须增大编码器每圈输出的脉冲个数 Z ,或者增大采样周期 Tc 。实际上,两个
值受到现实条件的制约,不可能无限的增大。
下载后可阅读完整内容,剩余3页未读,立即下载
167 浏览量
209 浏览量
1244 浏览量
899 浏览量
112 浏览量
131 浏览量
106 浏览量

ZLI960117
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
