磁悬浮系统建模新方法:线圈参数辨识与实验测量
需积分: 12 14 浏览量
更新于2024-08-12
收藏 584KB PDF 举报
"磁悬浮球控制实验系统" 是一种用于研究和开发磁悬浮技术的简易平台,它由电磁铁线圈、功率放大器、控制器、电涡流位移传感器、钢球和电源等核心组件构成。该系统的主要功能是实现钢球的稳定悬浮,并在此基础上进行控制策略的验证和优化。电涡流位移传感器负责实时监测钢球的位置,为控制系统提供反馈信息,以调整电磁铁线圈的电流,从而维持钢球的平衡。
传统的磁悬浮系统建模方法通常基于磁路定理,通过对非线性模型在平衡点进行线性化处理,得到用于控制器设计的线性模型。然而,这种简化处理忽略了诸如漏磁、边沿效应、铁磁材料磁阻等复杂因素,导致模型与实际系统存在显著偏差。此外,模型建立过程中的物理参数误差,如线圈匝数的不精确,也会对控制效果产生影响。
本文提出的新型建模方法则采取了线圈参数辨识和实验测量相结合的方式。首先,通过实验测量得到电磁铁线圈的特性参数,包括电阻、电感等,以更准确地描述线圈的电磁行为。同时,通过调整输入电流来寻找系统的平衡点,即球体悬浮时电磁力与重力平衡的状态,测量此时的平衡点电流和位置。这样建立的电压控制模型能够更真实地反映系统的动态特性,减少因假设简化带来的误差。
模型的准确性对于控制器设计至关重要。通过将新模型与仿真结果对比,证明了该模型与实际磁悬浮系统的吻合度较高。这一成果为后续的磁悬浮系统控制器设计提供了可靠的理论依据,有助于提高系统的控制性能,如稳定性、响应速度和精度。
本文提出的建模方法解决了传统方法中存在的问题,增强了磁悬浮系统模型的实用性和可靠性,为磁悬浮技术在高速、高精度应用领域的进一步发展奠定了坚实的基础。这种改进对于磁悬浮列车、磁悬浮轴承、磁悬浮隔振器以及精密定位平台等应用的控制策略优化具有重要意义,有助于推动磁悬浮技术的创新和进步。
第2卷 第3期
2007 年 3 月
226
一种新的磁悬浮系统建模方法
一种新的磁悬浮系统建模方法
朱晓明
1
,梅雪松
1,2
,张东升
1
(1.西安交通大学机械工程学院,西安 710049;
2.西安交通大学机械制造系统工程国家重点实验室,西安 710049)
摘 要: 针对磁悬浮系统所建模型与实际系统存在较大差异的问题,本文提出一种新的磁悬浮系统建模方法,
即采用线圈参数辨识和实验测量平衡点电流、平衡点位置的方法,建立磁悬浮的电压控制模型。通过仿真与实
验结果相比较,模型与实际系统基本吻合,为磁悬浮系统控制器的研究提供良好的基础。
关键词:磁悬浮系统;建模;仿真
中图分类号:TP273 文献标识码:A 文章编号:1673-7180(2007)03-0226-5
0 引言
由于磁悬浮技术具有无摩擦、噪音小、不需要
润滑等特点,近年来,磁悬浮技术已广泛应用于各
种具有高速、高精度控制以及需要真空、超净加工
环境等特殊的工业领域。如:磁悬浮列车、磁悬浮
轴承、磁悬浮隔振器、磁悬浮机床进给平台、精密
光刻定位平台等
[1~2]
。
在磁悬浮技术的应用中,使用最多的是电磁铁
磁悬浮系统。该系统具有强的非线性特点,需要采
用闭环控制。通常,电磁铁磁悬浮系统模型的建立
是基于磁路定理,忽略漏磁、边沿效应以及铁磁材
料的磁阻,先获得对象的非线性模型,然后在平衡
位置处对非线性模型进行线性近似,得到一个线性
模型,以此作为分析被控对象和设计控制器的基础。
但是,这种方法由于在计算过程中做了很多假设,
使得结果往往与实际系统的差异较大;而且由于不
可避免的某些物理参数的误差(如线圈匝数),或者
由于某种原因而无法获得全部的磁悬浮系统建模的
物理参数,给控制器的设计以及系统性能改善带来
了困难。为此,本文构建了一种研究磁悬浮技术的
球磁悬浮控制,在该实验平台上,采用一种简单的
实验方法,避免磁悬浮系统建模中存在的上述问题,
保证所建模型的仿真结果与实验结果的基本性。
1 磁悬浮球控制实验系统
磁悬浮球控制实验系统是研究磁悬浮的技术平
台,它具有结构简单、系统评判容易,在研究磁悬
浮系统模型,实施各种控制算法方面具有很重要的
作用
[3]
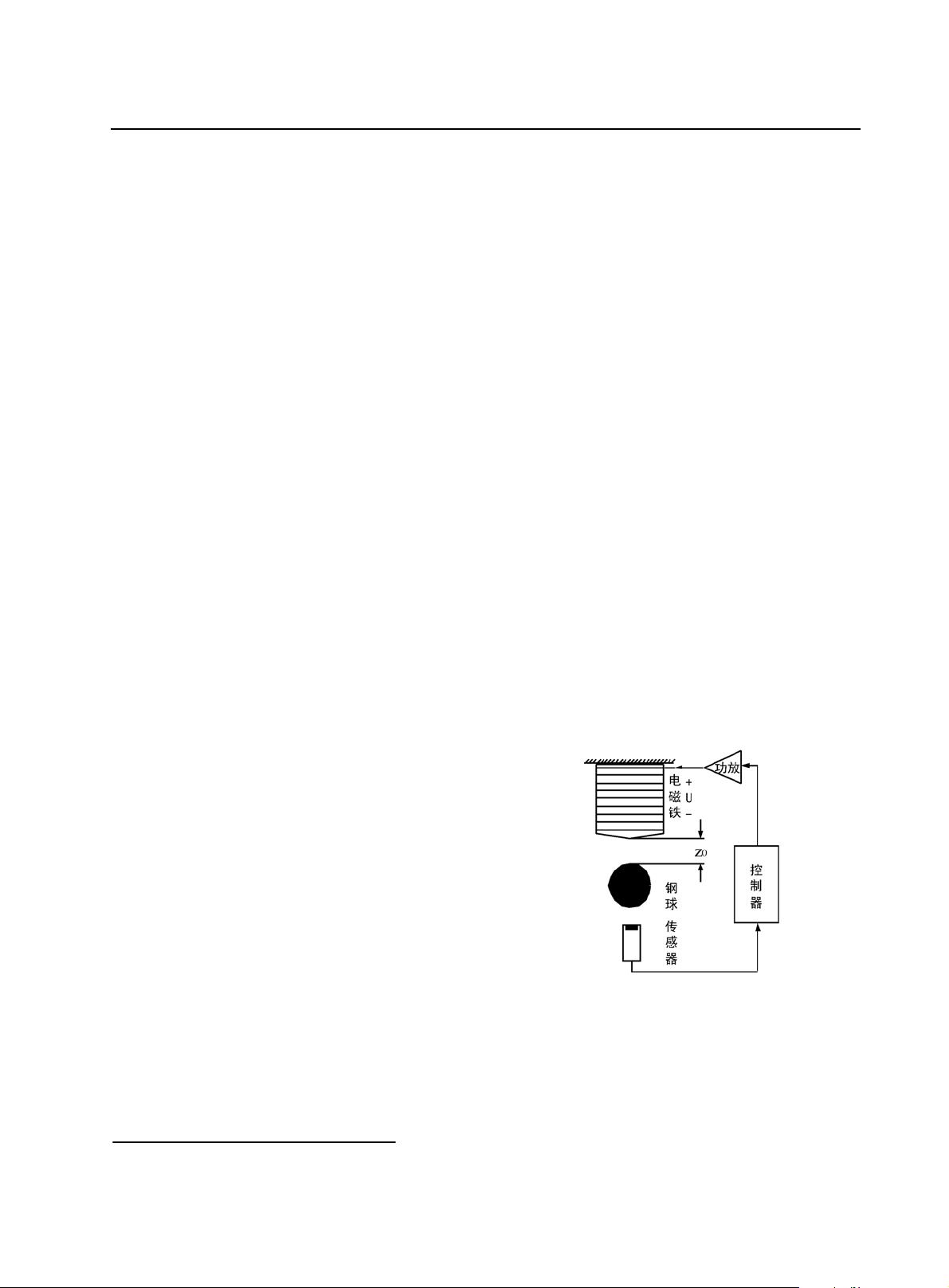
。本文自主设计的磁悬浮球系统如图 1 所示,
它主要由电磁铁线圈、功率放大器、控制器、电涡
流位移传感器、钢球、电源等元器件组成。
图 1 磁悬浮球系统的结构
Fig. 1 Frame of magnetic levitation system
磁悬浮球系统的工作原理是:电磁铁线圈中通
以一定的电流会产生电磁力,控制电磁铁线圈的电
压,使之产生的电磁力与钢球的重量相平衡,钢球
就可以悬浮在空中而处于平衡状态。但是这种平衡
基金项目:国家自然科学基金(50275117,50475091,50505035)
通讯作者: E-mail:iehome24@gmail.com
下载后可阅读完整内容,剩余4页未读,立即下载
2024-12-27 上传
2024-12-27 上传
2024-12-27 上传
2024-12-27 上传

weixin_38668754
- 粉丝: 3
- 资源: 972
 我的内容管理
展开
我的内容管理
展开







最新资源
- Spotipy分类:一些脚本来收集Spotify歌曲数据并在其上建立分类器
- iflag:伊法拉格
- switchCity.rar
- twitter-clone:代码一起教程 - 构建使用Twitter的克隆阵营鱼钩
- ResNet50模型训练猫狗数据集
- kushyproducts-website:素食浴室用品公司的网站
- Malaysia-GST-Checker:http的源代码
- 审核请求
- react-native-wheel-color-picker:用于本机React的颜色选择器组件
- 中国省市县区划2020年最新shp数据.rar
- SinGan:审核原始算法和模型
- 教育培训网站模版
- solo-potdgg-fe
- 第一档
- shubhamhackz
- fullstack_part4
