煤矿救援机器人虚拟样机仿真分析及动力学研究
需积分: 10 114 浏览量
更新于2024-08-12
收藏 336KB PDF 举报
“煤矿救援机器人虚拟样机仿真分析 (2008年)”是关于利用虚拟样机技术对煤矿救援机器人进行三维模型构建和仿真分析的研究论文。作者通过CATIA环境建立机器人的三维实体模型,并在ADAMS软件中进行运动学和动力学仿真,以深入理解机器人的运动特性和动力性能。
在论文中,作者魏娟、贡广利和马宏伟首先介绍了虚拟样机技术的应用背景,这种技术在工程领域中被广泛用于产品开发和分析,能有效提升设计效率和质量。他们特别关注的是煤矿救援机器人,这是一种在危险环境中执行救援任务的重要设备,其性能和可靠性至关重要。
接着,他们详细描述了如何运用CATIA软件创建煤矿救援机器人的三维模型。CATIA是一款强大的计算机辅助设计(CAD)工具,能够精确模拟物体的几何形状和结构。通过这个模型,研究人员可以直观地观察机器人的结构布局,评估其机械设计的合理性。
然后,论文聚焦于机器人自撑起运动的仿真分析。自撑起是救援机器人执行任务时的关键动作,它要求机器人能够自主从地面升起。研究者在ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件中建立了机器人的动力学模型,这是一个专门用于机械系统动态分析的工具。通过动力学仿真,他们能够分析摆臂在运动过程中的速度、加速度和驱动力矩变化,这些参数对于理解机器人的运动性能和优化控制策略至关重要。
仿真结果揭示了摆臂在执行自撑起运动时的动力学特性,为后续的仿真分析提供了数据支持。这些数据不仅有助于改进机器人的运动控制算法,还为煤矿救援机器人控制系统的设计提供了理论基础。此外,这些研究结果对于预测机器人在实际工作场景中的行为和性能,以及预防潜在故障都具有重要意义。
这篇论文通过虚拟样机技术,深入探讨了煤矿救援机器人的结构设计和运动性能,对提升救援机器人的安全性和效率提供了理论依据。同时,这也为相关领域的研究者提供了参考,以促进未来在复杂环境下救援机器人的技术进步。
2
∞
8
年
11
月
第
27
卷第
11
期
机械科学与技术
November
2
∞
8
Mechanical
Science
and
Technology
for
Aerospace
Engineering
Vo
l.
27
No.11
煤矿救援机器人虚拟样机仿真分析
魏娟,贡广利,马宏伟
(西安科技大学机械工程学院,西安
71
∞
154)
魏娟
摘
要:运用蛊拟样椒,技术,在
CATIA
环境下建立煤矿救援机器人三维实体模型并对其结构和运动
姿态进行仿真分析。以机器人自撑起运动为例,建立其动力学模型,在
ADAMS
下进行运动学和动力
学仿具。分析机器人在完成自撑起运动时,摆臂的速度、加速度与驱动力矩的变化规律,为煤矿教援
机器人的进一步仿具分析提供依据,同时也为煤矿就提机器人控制系统设计提供可行的理论数据。
关键词:煤矿就提机器人;虚拟样机;动力学建模;仿真分析
中固分类号:TP24
2
文献标识码
:A
文章编号:
1003-8728
(2008)
11-1369
-0
5
Simulation Analysis of the Virtual Prototyping of a Mine Rescue Robot
Wei Juan, Jia Guangli ,
Ma
Hongwei
(College
of
Mechanical
En
gineering
, Xi'an
University
of
Sc
ience
and
Technology
, Xi'an
71
∞
154)
Abstract:
Applying the technique
of
virtual prototype ,
we
build the 3-D model
of
a mine rescue robot by using
CA TIA
in
order
ωsimulate
and
analyze
由
e
structures and motions of the robot.
Taking
由
e
robo
t'
s pushing-up by
itself
as an example , its dynamic model is built,
and
its kinematics
and
dynamics is simulated by using
ADAMS
to
analyze the changing rules
of
its velocities, accelerations and driving moments
of
its swing-arms
wi
出
time.
币
le
re-
sult is useful for further simulation analysis of the
ßÙ
ne rescue robot, and
for
由
e
design
of
its control
sys
忧
m.
Key
words:
mine rescue robot; virtual prototype; dynamic model; simulation analysis
在我国,煤矿井下事故时有发生,其中约
3/4
是
由火灾和瓦斯爆炸造成。井下发生爆炸事故后,巷
道环境严重被破坏,随时还会发生二次爆炸事故。
为了能在事故发生后,迅速、准确地实施井下救援,
研究一种用于获取事故现场信息的煤矿救援机器
人,具有重大的现实意义。本文借助虚拟样机技
术
[1]
将煤矿救援机器人设计意图生成可见的三维
数字模型,并对其进行仿真分析。
1
煤矿救援机器人虚拟样机模型
在煤矿救援机器人结构方案设计中,针对不同机
器人移动机构特性和已有机器人
[2
,
3]
运动特性进行了
综合分析,再结合煤矿井下灾害复杂环撞对救援机器
人的特殊要求,设计了一种利用六履带实现越障功能
收稿日期
:2
∞
7-ω-01
基金项目:国家自然科学基金项目
(5
凶
74075)
,陕西省自然科学基
金项目
(2
阳
E
2
12)
和陕西省教育厅专项科研计划项目
(07
JK3
20)
资助
作者简介:魏娟(1
968
-),副教授,博士研究生,研究方向为数控
技术,机电一体化系统.
weij@
XU8t. edu.
cn
和较强的环境适应能力的煤矿救援机器人。在设计
过程中利用
CATIA
和
ADAMS
软件模拟仿真机器人
在煤矿井下灾害区作各种运动的状况,同时进行相
应的动力学分析,整个过程采用交互式的设计方法,
以便及时调整设计参数,重构样机模型。
1.
1
基于
CATIA
建立煤矿救援机黯人三维实体模型
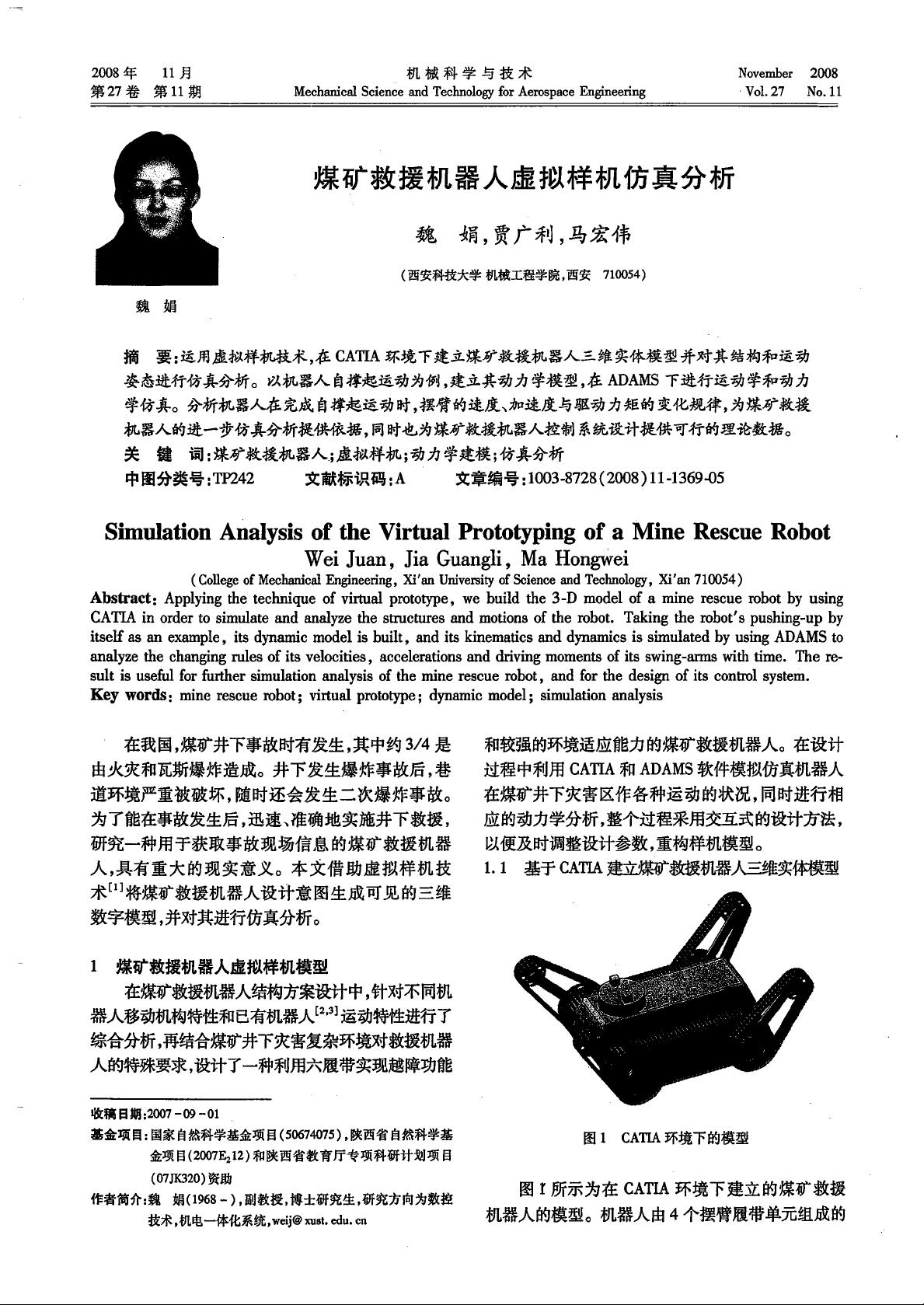
图
1
CATIA
环境下的模型
图
I
所示为在
CATIA
环境下建立的煤矿救援
机器人的模型。机器人由
4
个摆臂履带单元组成的
下载后可阅读完整内容,剩余4页未读,立即下载
2020-04-24 上传
2021-05-31 上传
2021-08-14 上传
2020-04-17 上传
2021-08-14 上传
2020-04-18 上传
2020-06-29 上传
点击了解资源详情
点击了解资源详情

weixin_38690402
- 粉丝: 5
- 资源: 1007
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
