μC/OS-II操作系统下的CAN驱动程序设计与实时性提升
30 浏览量
更新于2024-08-31
收藏 312KB PDF 举报
"μC/OS-II的CAN驱动程序设计,实时性,CAN现场总线,I-CAN协议,嵌入式操作系统,CAN节点,ECU,LPC2368,CAN收发器,SN65HVD230D,驱动程序分层结构,CAN设备控制层,CAN接口控制层"
在设计CAN(Controller Area Network)驱动程序时,实时性是一个至关重要的考量因素,尤其是在汽车动力系统这样的应用场景中。μC/OS-II是一种小型嵌入式实时操作系统,由Jean J. Labrosse开发,它的可剥夺型内核确保了任务调度的高效性和实时响应性,这使得它成为CAN驱动程序设计的理想选择。
CAN总线系统中,CAN节点是通信的基础,通常包括主控制器、CAN控制器和CAN收发器。在本文的硬件设计中,采用了NXP的LPC2368微控制器,它内置了CAN控制器,与3.3V的CAN收发器SN65HVD230D配合,提供稳定的运行环境。SN65HVD230D具有高输入阻抗,能兼容更多的节点并确保与5V CAN收发器的兼容性。
CAN驱动程序的设计遵循了分层结构的原则,以增强软件的可移植性和维护性。驱动程序分为三个层次:CAN设备控制层、CAN接口控制层以及应用层。CAN设备控制层主要负责建立主控制器与CAN控制器的连接,进行初始化和复位,这部分在LPC2368中已由硬件完成。而CAN接口控制层则处理具体的CAN控制器功能,如设置工作模式、发送和接收数据,以及配置验收滤波器,这些都是通过对CAN控制器的寄存器进行读写操作来实现的。
CAN接口控制层的初始化程序是在应用层中实现的,它调用了同一层中编写的内部函数,以完成对CAN控制器的全面配置。这种分层设计不仅简化了复杂性,还使得不同硬件平台上的驱动程序移植变得可能,有利于代码的重用和系统的升级。
在I-CAN协议的支持下,通过μC/OS-II操作系统,可以进一步提升CAN总线系统的实时性能。应用层的设计和优化对于提高系统的响应速度至关重要,因为它是与上层应用直接交互的部分,决定了应用程序如何有效地利用底层硬件资源进行数据传输。
设计μC/OS-II的CAN驱动程序是一个涉及硬件接口、软件结构优化和实时性提升的综合过程。通过合理的设计和实施,可以确保CAN总线系统在汽车动力系统等实时性强的应用场景中表现出优秀的性能。
μC//OS-II的的CAN驱动程序设计驱动程序设计
实时性是衡量CAN现场总线系统性能的一个重要标准。本文提出一种采用μC/OS-II操作系统和I-CAN协议,在
应用层面上提高CAN总线系统实时性的驱动程序设计方案,并以分层的方式逐层阐述CAN驱动程序的设计过
程。
μC/OS-II是Jean J.Labrosse开发的一种小型嵌入式操作系统。它实质上是基于优先级的可剥夺型内核,系统中的所有
任务都有一个唯一的优先级别,适合应用于实时性要求较强的场合。本文采用μC/OS-II来设计CAN的驱动程序,以满足系统
的实时要求。
1 CAN节点的硬件设计节点的硬件设计
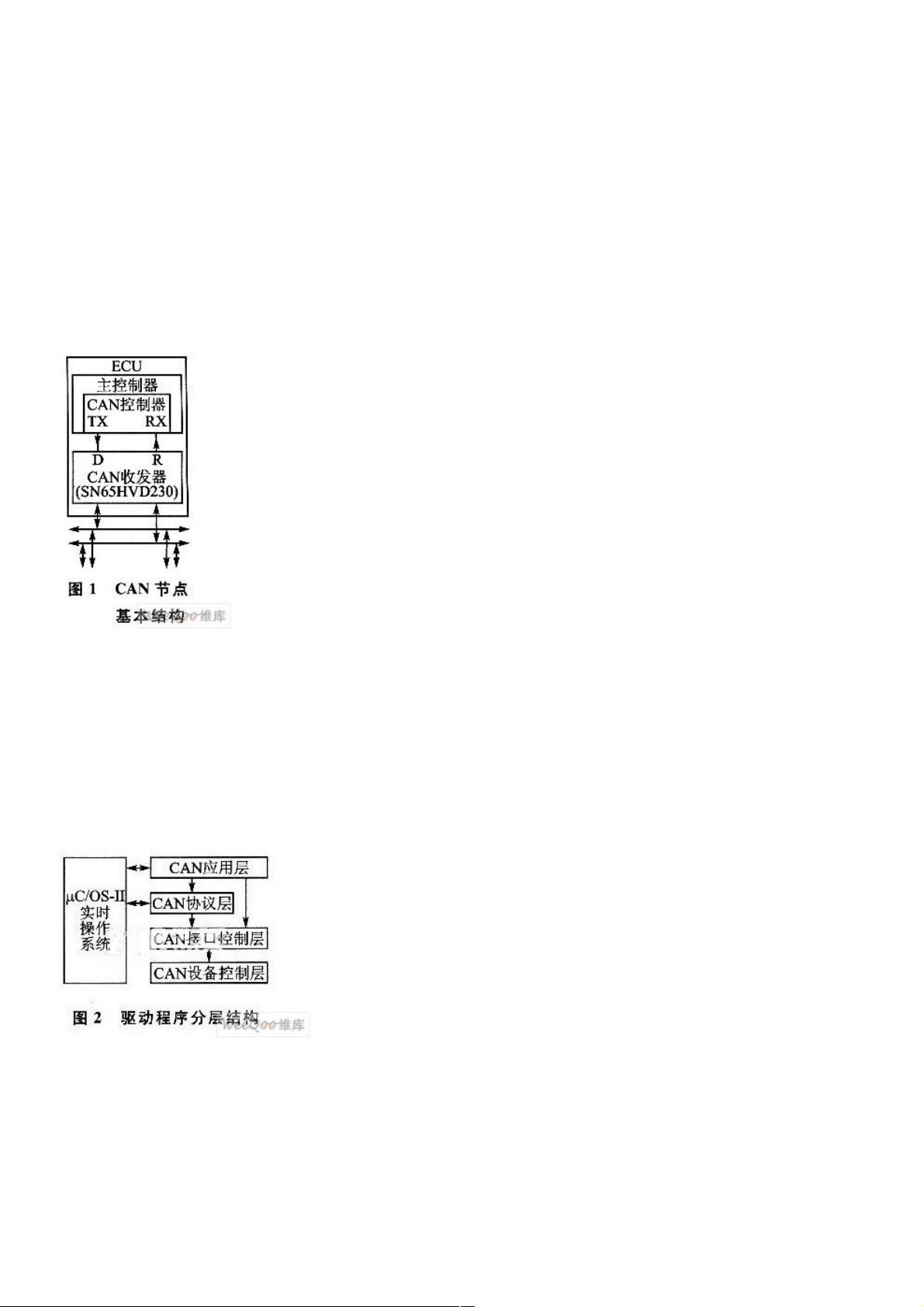
CAN节点是分布在CAN网络中进行相互通信的基本单元,主要由主控制器、CAN控制器和CAN收发器组成。本设计中,
节点的基本结构如图1所示。在CAN网络中,ECU(ElectrONic Control Unit)是指一个具有完整功能的CAN节点。
采用NXP公司的
LPC2368是一款3.3 V器件,虽然其对应的CAN收发器接口引脚能够承受5 V电压,但为了让CAN节点能够更稳定地运
行,这里采用TI公司的3.3 V CAN收发器SN65HVD230D与之配合使用。凭借高输入阻抗特性,SN65HVD230D可以在一条
总线上支持多达120个CAN节点,并且能够和5V的CAN收发器良好地兼容。本文重点介绍CAN驱动程序的设计方法。
2 CAN驱动程序设计总体思想驱动程序设计总体思想
为了使软件可移植性强、易于维护,采用分层的方法编写CAN驱动程序。驱动程序分层结构如图2所示。图中,双向箭头
表示实时操作系统μC/OS-II与CAN驱动程序之间的数据交换,单向箭头表示上层软件对下层软件的调用。
3 CAN设备控制层和设备控制层和CAN接口控制层接口控制层
CAN设备控制层的主要任务是:初始化主控制器与CAN控制器之间的连接配置,复位CAN控制器,建立主控制器和CAN
控制器之间的通信函数。由于LPC2368内部集成了CAN控制器,CPU可以通过内部APB总线接口对CAN控制器的所有寄存器
进行访问,所以不再需要编写设备控制驱动层程序,已经完全由硬件实现了。
CAN接口控制层主要任务是:实现CAN控制器的各种功能,如设置控制模式、发送数据、释放接收缓冲区、配置验收滤
波器等。这些操作都是通过读写CAN控制器的内部相关寄存器来实现的。
CAN控制器初始化程序(在应用层中实现,内部调用的函数也都是在该层中编写的)如下:
下载后可阅读完整内容,剩余4页未读,立即下载
2020-11-06 上传
2020-07-26 上传
点击了解资源详情
2020-10-25 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38621150
- 粉丝: 3
- 资源: 880
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
