




双边塑性碰撞调谐质量阻尼器的位置控制系统分析
需积分: 5 194 浏览量
更新于2024-08-10
收藏 277KB PDF 举报
"双边塑性碰撞调谐质量阻尼器的位置控制 (2012年)"
本文探讨了在2012年的一项研究,主要关注双边塑性碰撞调谐质量阻尼器(TMD)的位置控制问题。研究者建立了一个双边塑性碰撞TMD系统的动力学模型,该模型涉及一个具有两个自由度的结构主质量M,通过刚度系数K的弹簧和阻尼系数C的阻尼器连接。当TMD在有限空间内发生剧烈碰撞时,其动态响应会变得复杂,可能影响结构的稳定性和使用寿命。
研究人员利用Poincaré映射理论来分析系统的周期运动和分岔现象,同时考察了碰撞对系统稳定性的影响。Poincaré映射是一种研究离散时间系统的方法,它通过对连续系统在特定截面上的投影来揭示系统的动态行为。在这个过程中,他们还分析了误差动力学方程的收敛速度与系数矩阵A之间的关系,矩阵A在控制理论中通常代表系统动态的线性化表示。
为了克服碰撞带来的问题,文章提出了使用同步反馈控制法来对双边塑性碰撞TMD系统进行位置控制。这种方法通过对系统参数进行精确的微扰来稳定不稳定的周期运动,从而减少碰撞、冲击和噪声,提高系统的效率、寿命和安全性。文中提到了先前文献中混沌控制、延迟反馈法和位置反馈法等控制策略,但重点是反馈同步控制法的应用。
通过数值计算和模拟,研究证明了同步反馈控制法的有效性,可以成功地控制双边塑性碰撞TMD系统的运动,确保其在遇到碰撞时仍能保持良好的性能和稳定性。这一工作对于理解和优化高层建筑和高耸结构的振动控制具有重要意义,特别是在解决由于空间限制导致的TMD碰撞问题上提供了新的解决方案。
第
33
卷第
2
期
2012
年
4
月
河南科技大学学报:自然科学版
Journal of Henan University of Science and Technology: Natural Science
Vo
l. 33
No.2
Apr. 2012
文章编号:
1672 - 6871
(2012)
02 - 0092 - 05
双边塑性碰撞调谐质量阻尼器的位置控制
李晓华
a
王宝基
a
闰安志
b
(河南理工大学
a
物理化学学院
;b.
土木工程学院,河南焦作
454000)
-
摘要:建立双边塑性碰撞调谐质量阻尼系统的动力学模型,根据
Poincar
岳映射图,研究了系统的周期运动和分
岔,以及碰撞对结构稳定性的影响,并且分析了误差动力学方程的收敛速度与系数矩阵
A
的关系。利用同步
反馈控制法对双边塑性碰撞调谐质量阻尼系统进行位置控制,数值计算结果验证了该方法是可行有效的。
关键询:非光滑动力系统;塑性碰撞
;Poincaré
映射;位置控制
中圈分类号
:0322
文献标志码
:A
。
...............
目。自
随着社会的发展、人口增加和人们生活水平的提高,土地稀缺已成为当今社会面临的主要问题。为
了满足人们的需求,高层建筑和高耸结构不断出现,面临的最大的挑战是寻找更加有效的振动控制措
施。调谐质量阻尼器
(TMD)
是围绕结构共振频率而产生额外振动的被动控制器,并被广泛应用于低阻
尼结构之中。在实际工程中,当
TMD
较大的冲程受到有限空间限制时,
TMD
和墙或建筑障碍物将会发
生剧烈的碰撞和冲击,导致减振系统的动态响应变得十分复杂,而影响该系统的稳定性和使用寿命。因
此,要想减小
TMD
运动空间受限时系统的碰撞、冲击和噪声,提高系统的使用效率、寿命及安全性,位置
的控制就显得尤为重要。
最早由文献[
1
J
提出的混沌控制观点已被成功用于碰撞振动系统
[2
- 4
J
它是通过对有效的控制参
数采用微小而精准的扰动,使不稳定的周期运动变为稳定。另外,文献
[5J
采用延迟反馈法,文献
[6
J
采
用位置反馈法对碰撞动力学控制进行了研究。本文采用反馈同步控制法
[7J
对谐激励下的双边塑性碰
撞
TMD
系统的主结构和
TMD
进行位置控制,并利用数值模拟对该种控制方法的可行性和有效性进行
了验证。
c
1
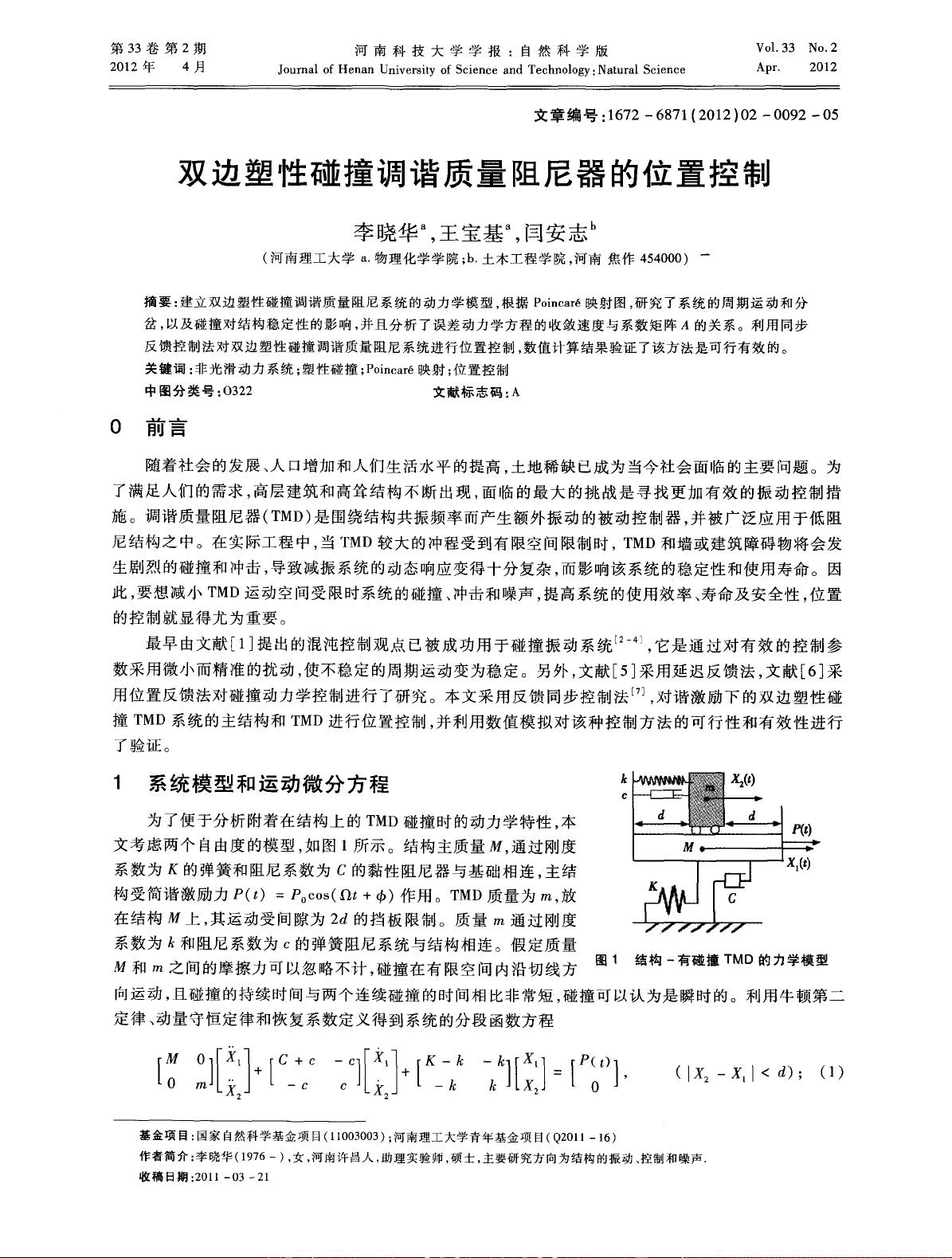
系统模型和运动微分方程
为了便于分析附着在结构上的
TMD
碰撞时的动力学特性,本
文考虑两个自由度的模型,如图
1
所示。结构主质量
M
,
通过刚度
系数为
K
的弹簧和阻尼系数为
C
的黠性阻尼器与基础相连,主结
构受简谐激励力
P(t)
= Pocos(Ot
+
φ)
作用。
TMD
质量为
m
,
放
在结构
M
上,其运动受间隙为
2d
的挡板限制。质量
m
通过刚度
系数为
k
和阻尼系数为
C
的弹簧阻尼系统与结构相连。假定质量
M
和
m
之间的摩擦力可以忽略不计,碰撞在有限空间内沿切线方
k
圈
1
结构-有碰撞
TMD
的力学模型
向运动,且碰撞的持续时间与两个连续碰撞的时间相比非常短,碰撞可以认为是瞬时的。利用牛顿第二
定律、动量守恒定律和恢复系数定义得到系统的分段函数方程
l
、‘
F
t
f
飞
AU
P
TE--aaEE--
一-
吨
EEEEBEEP-4
12
XX
F-4.
,,
EBEEt-
唱
EEEE--E
」
,缸
-FK
EK
-,
K
K-
l
+
1|||
」
12
·XX
「
Ili--
』
1lL
-EBB-J
PU
-c
ρ-U
PLV
+-
C
FEEl-K
+
「
Ill--
」
12
hXuX
「
ll1tIII-L
l
om
MO
I
( I X
2
- X[ I <
d);
( 1 )
基金项目:国家自然科学基金项目(1
1003003
)
:河南理工大学青年基金项目
(Q2011
-16)
作者简介:李晓华(1
976-)
,女,河南许昌人,助理实验师,硕士,主要研究方向为结构的振动、控制和噪声.
收稿日期
:2011
-
03
一
21
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-26 上传
双边LCC移相控制与PI调节技术:实现无线电能传输及高效MPC模型预测控制,双边LCC移相控制,pi控制输出电压恒定 无线电能传输,还可做mpc模型预测控制 ,双边LCC移相控制; pi控制; 输出电
2025-02-06 上传
基于双边LCC移相控制的无线电能传输系统与PI及MPC模型预测控制实现输出电压恒定,双边LCC移相控制与无线电能传输技术的融合:实现恒定电压PI控制与MPC模型预测控制,双边LCC移相控制,pi控制输
2025-02-19 上传
197 浏览量
2025-02-22 上传
2024-10-25 上传
2024-10-30 上传
2023-09-15 上传
283 浏览量

weixin_38686658
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- 计算机组成原理教程详尽解析
- 深入探讨C#中任务队列的创建与线程管理
- 解决Android 7.1 DDMS无文件列表显示的方法:更新ddmlib.jar
- 仿Win7主题美化包:快速启动无bug
- Android实现图片与文字同步上传解决方案
- 实时雨水情数据库的标准表结构与标识符
- 图像存储技术的革新与实践应用
- UC聊天室悄悄话查看器:房间人必备工具
- Eclipse Luna 4.4.2版(Windows64位)发布信息
- LTE R8协议栈规范详解及文档计划
- KJ-Guard:远程维护与多点还原的计算机系统救援解决方案
- IES光域网工具:查看、制作及文件修改指南
- 舞蹈主题网页制作:大学生创意作业展示
- Xshell6:服务器连接与文件传输的终极工具
- 深入解析数据库原理与设计要点
- Swift开发:从零开始制作App开胃菜






















