混合高斯与稀疏光流的交通场景多目标跟踪算法
161 浏览量
更新于2024-08-31
2
收藏 569KB PDF 举报
"交通场景中的实时多目标自动跟踪算法是一种针对交通监控中多目标跟踪问题的解决方案,强调实时性和鲁棒性。该算法结合混合高斯背景建模与稀疏光流算法,旨在解决光照变化、噪声干扰以及目标形变带来的挑战。
在算法设计上,首先运用自适应背景差分法来区分前景目标与背景,这一方法能够动态适应环境变化,有效地从复杂背景中提取出运动目标。接着,通过形态学处理和滤波进一步精炼前景区域,确保目标的精确识别。对于新目标的检测,算法在特定区域设置车辆检测区,以减少误检并提高检测效率。
一旦目标被识别,算法采用Harris角点作为特征点,这种特征点对光照变化具有很好的鲁棒性,且不易受噪声影响。特征点的提取有助于在后续跟踪阶段稳定地标识目标。接着,稀疏光流算法被用于计算特征点的运动轨迹,预测其在下一帧中的位置,以建立前后帧间的数据关联。为了应对目标可能的形变,算法引入模板更新机制,适时调整跟踪模板,以保持跟踪的准确性。
在性能方面,实验结果证明了该算法在多数交通场景下的有效性。它不仅具备良好的实时性,能够在处理大量目标时保持较快的运算速度,而且对光照变化和噪声具有很高的抗干扰能力,能实现多目标的精确且稳定的跟踪。
多目标跟踪技术是视频分析和智能交通系统中的关键技术,其难点包括数据关联、颜色相似性、背景复杂性、目标尺寸变化和实时性。传统的跟踪方法,如基于颜色特征的Meanshift和Camshift、卡尔曼滤波、粒子滤波以及光流跟踪,都有其局限性。本文提出的算法通过融合多种技术,克服了这些传统方法的不足,为实时交通监控提供了高效且可靠的多目标跟踪手段。
该算法在交通场景的实时多目标跟踪中展现出优越性能,不仅提高了跟踪的准确性和稳定性,还降低了光照和噪声的影响,对于提升交通监控系统的效能具有重要意义。未来的研究可能将探索如何进一步优化模板更新机制,以及如何将此算法应用于更大规模、更复杂的交通环境中。"
交通场景中的实时多目标自动跟踪算法交通场景中的实时多目标自动跟踪算法
针对交通场景中多目标跟踪过程中实时性和鲁棒性的问题,提出一种基于混合高斯和稀疏光流的多目标自动跟
踪算法。该算法利用自适应背景差分法提取前景目标,用特征点对目标进行表达,通过稀疏光流算法建立起前
后帧间的数据关联,并通过模版更新机制来降低可能的较大形变带来的干扰。实验结果表明,该算法适用于多
数交通场景,实时性较好,对光照和噪声都具有很强的鲁棒性,可以实现对多目标的准确而又稳定的跟踪。
0 引言引言
随着城市化进程的加快,交通状况日益恶化,基于视频的检测和跟踪逐渐成为受到关注的研究领域。目前目标跟踪技术的
难点有数据的关联问题、颜色的相似性、背景的稳定性和复杂性、目标尺寸的变化和实时性等[1-2]。目标跟踪常用的方法有:
基于颜色特征的Meanshift和Camshift[3-4],基于贝叶斯估计的卡尔曼滤波[5],基于蒙特卡洛方法的粒子滤波[6-7],还有基于
光流计算的光流跟踪[8-9]。然而在跟踪的过程中,如果目标与背景颜色相近或目标之间颜色相近,则基于颜色特征的跟踪方法
会失效;实际场景中目标的运动比较复杂,而卡尔曼滤波器要求目标具有线性高斯运动的特性,因此跟踪效果不理想;粒子滤
波在跟踪多目标时,实时性是一个突出的问题,时间开销会随着目标数的增多而呈指数性增长;光流分为稠密光流和
针对以上问题,提出一种结合
1 算法基本思想算法基本思想
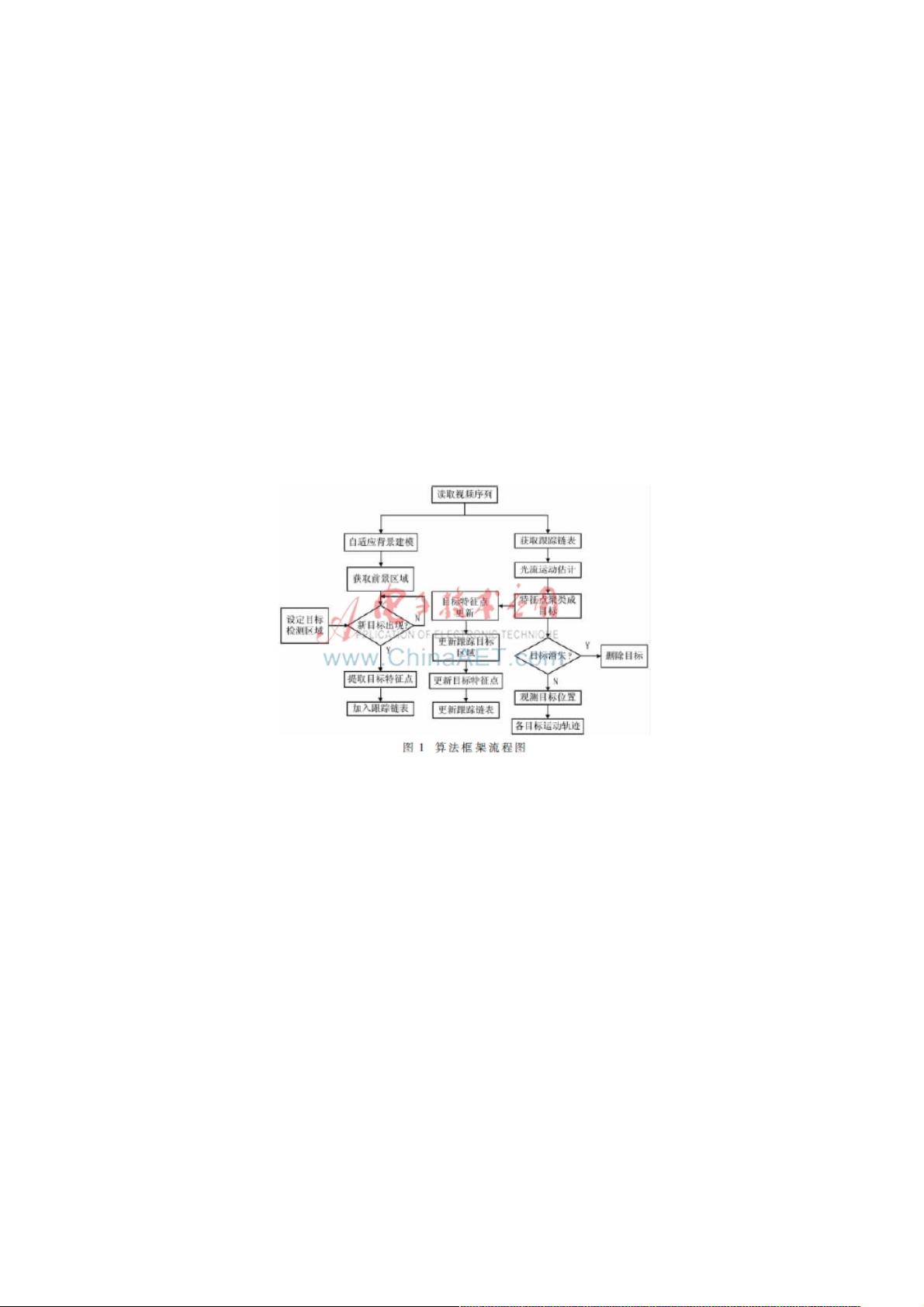
本文算法框架如图1所示,首先通过混合高斯模型进行背景建模,背景差分获得前景区域,形态学处理和滤波得到前景目
标,同时在车辆进入场景的入口处设定车辆检测区域,进行新目标的进入检测,从而确定进入场景中目标的个数,这样可以通
过先验知识提前避免对整个场景进行目标的检测,提高效率的同时又能在后续非检测区域进行跟踪时一定程度上规避目标的合
并与分离的问题;然后对检测到的车辆目标进行Harris特征点的提取,用提取的特征点对目标进行标识,这样不仅对噪声不敏
感,还可以抵抗光照变换带来的影响;接着对提取的特征点进行光流运动估计,预测特征点的运动位置,然后在跟踪的过程中
适时地对目标跟踪模版进行更新,从而保证了目标跟踪的准确性和稳定性;而且本算法采用无监督的运动目标检测、提取和跟
踪,实现在视频序列中自动检测并跟踪多目标。
2 新目标检测与提取新目标检测与提取
2.1 前景分割前景分割
利用混合高斯模型建立起背景图像,通过当前帧图像与背景图像的差分获得包含运动目标的前景图像。由于背景建模的精
确性,会有一些前景的像素没有检测出来,形成空洞,还有一些背景的像素由于误检测而被判定为前景,成为一些零星的噪声
点。所以需要对前景图像进行进一步的处理,在对前景图像进行二值化操作之后,利用高斯滤波和中值滤波进行平滑处理和去
噪处理,这时得到的图像再利用形态学处理使得前景区域更加完整。
2.2 新目标的检测新目标的检测
在视频图像上设定新目标的进入检测区域,来捕捉新目标的出现。在这过程中建立潜在目标列表(potential_list),通过测
量目标的中心位置(xc,yc)记录目标的状态,用这个测量和新目标建立关联来定义新目标的出现,根据车辆相对场景的位置大
小设立阈值(xT,yT),若|xc-xT|≤T或|yc-yT|≤T(T为常数)则判定为新目标出现,然后用矩形框来拟合目标轮廓,把拟合的矩
形框加入到待跟踪目标列表(temp_list)当中,得出运动目标描述的矩形。
2.3 目标提取与标识目标提取与标识
在捕捉到新目标之后,就需要对新目标建立跟踪关系。由于车辆目标为刚体且纹理丰富,可以提取出一定数量而且可以精
确定位稳定的特征点,因此本文采用基于Harris特征点的数据关联跟踪,利用Harris特征点来标识目标。Harris特征检测器是
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-08 上传
2024-02-23 上传
点击了解资源详情
点击了解资源详情
2021-08-10 上传
2017-07-05 上传
2024-04-16 上传
2022-06-25 上传
2023-11-01 上传

weixin_38672739
- 粉丝: 8
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
