三菱FX PLC与伺服定位控制详解:限位、DOG信号与案例配置
需积分: 27 144 浏览量
更新于2024-07-15
1
收藏 1.55MB PDF 举报
本篇文档是关于使用三菱FX系列PLC进行三菱伺服电机定位控制的简要总结,主要内容涉及以下几个方面:
1. **PLC硬件配置**:
- 使用的是三菱FX3GA-60MT-CM型号的可编程控制器,具备强大的逻辑处理能力。
- 选择的伺服电机为HG-KR13J,由三菱生产,适用于精确的定位任务。
- 驱动器选用MR-J4-10A,该型号可能提供了高精度的控制性能。
- 伺服参数设置通过三菱的MR Configurator2软件进行调整,确保设备之间的良好通信和协调。
2. **定位控制逻辑**:
- 限位控制采用常闭触点(b触点),X4、X5和X6分别代表左限位、近点信号(DOG)和右限位,它们在有信号输入时置ON,无信号时为OFF。通常,近点信号(DOG)使用常开触点(a触点)设计。
- 原点回归指令(DSZR)利用接入的X5点的常开触点,如果误设为常闭触点,需在程序中调整为先驱动M点再执行回归操作。
3. **硬件连接**:
- 限位和DOG开关PM-T45由松下生产,输出信号与PLC的X点相连,其中X4和X6原本接黑色(遮光时ON),实际应用中可能因为线接反,需要在程序中处理。
- 电缸为ETS-10-16065-E-M1NNNN,导程为16mm,脉冲当量设定为10um,一个完整行程需要1600个脉冲。
4. **特殊处理**:
- 由于硬件连接的局限性,程序需要对X5的接线异常进行调整,使得其在无遮挡时保持输出ON状态,这可能涉及到程序内的逻辑反转处理。
5. **原点回归指令**:
- 原点回归指令的方向需要根据具体的应用场景和机械结构来确定,可能涉及电机回零或者参考点校准。
总结来说,本文档详细介绍了如何利用三菱FX PLC控制伺服电机实现精确的定位功能,包括硬件选型、信号处理逻辑、参数设置以及特殊情况下程序调整的方法。这对于从事工业自动化或PLC编程的工程师来说是一份实用的技术参考资料。
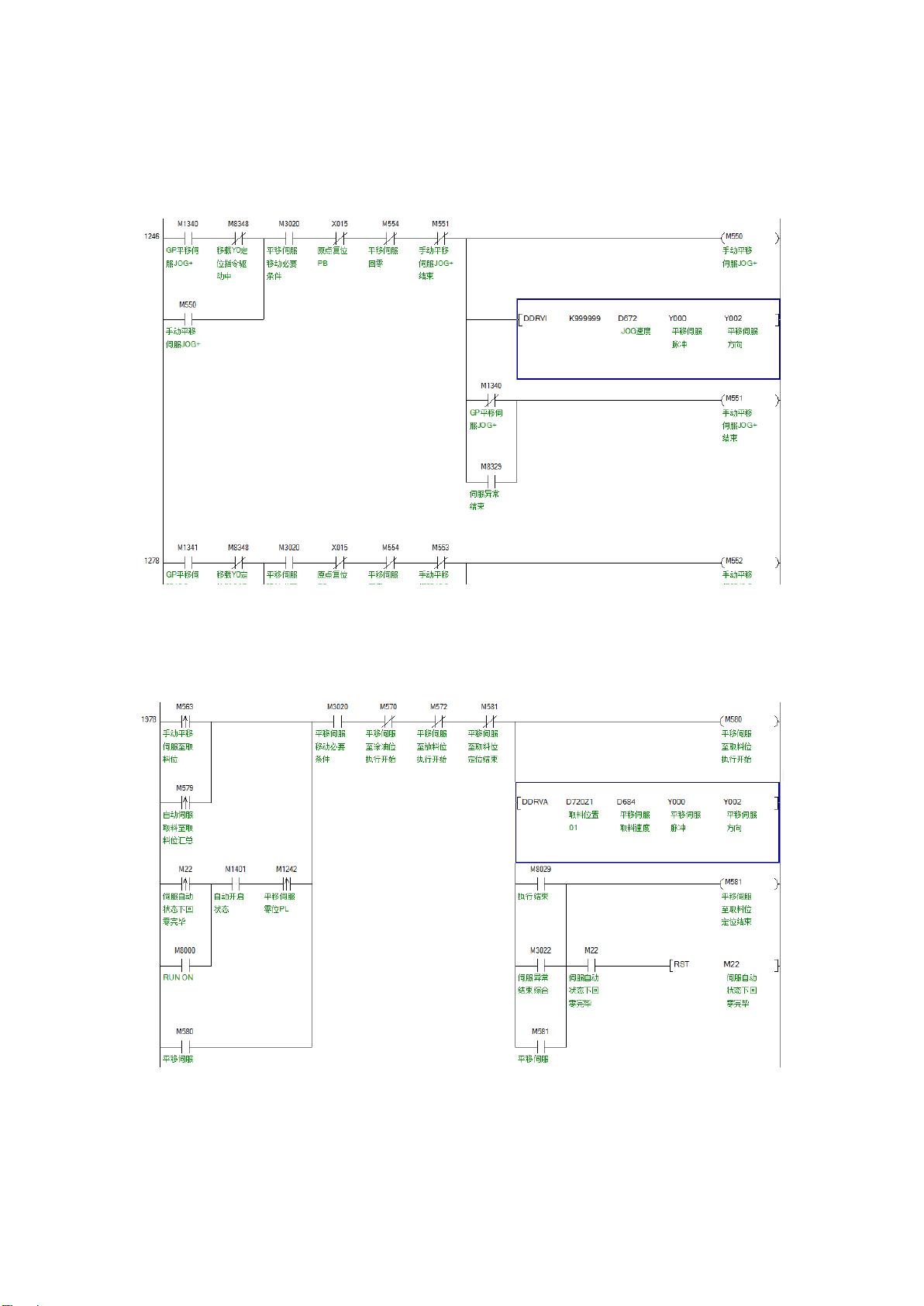
相对定位 DRVI:
绝对定位 DRVA:
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2017-08-16 上传
2020-06-04 上传
2020-06-04 上传
126 浏览量
2023-02-19 上传
2023-05-28 上传

CXZXSY
- 粉丝: 19
- 资源: 59
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
