OpenCV车道线检测实现详解
187 浏览量
更新于2024-09-02
1
收藏 461KB PDF 举报
"本文主要探讨了使用OpenCV进行车道线检测的实现技术,包括图像处理的各个步骤,如图像裁剪、反透视变换、二值化、形态学滤波、边缘检测以及直线检测。虽然文章指出反透视变换的效果不尽如人意,但其他方法在特定光照条件下表现出色。此外,文章还提到了光照变化、道路状况等因素对检测结果的影响,以及系统参数固定导致的局限性,并提出了改进空间,即动态调整参数以适应不同环境。"
车道线检测是自动驾驶和智能交通系统中的重要组成部分,OpenCV作为一个强大的计算机视觉库,提供了丰富的工具和技术来实现这一功能。首先,为了聚焦于车道线,通常会进行图像裁剪,通过设定图像的感兴趣区域(ROI)来排除不必要的背景信息。
接着,反透视变换用于模拟人眼观察到的宽广视角,但在实际应用中,由于ROI的设定和矩阵计算的复杂性,可能会导致变换效果不佳。然而,这一技术对于消除图像畸变和创建鸟瞰图至关重要。
在预处理阶段,将彩色图像转换为灰度图并执行二值化处理,以简化图像并突出车道线特征。接着,形态学操作如腐蚀和膨胀用于去除噪声,增强车道线的轮廓。在本案例中,作者发现Canny边缘检测算法相对于Sobel和Laplacian变换,对车道线的检测效果更优。
直线检测是车道线检测的核心,文章中提到了两种方法:一是利用OpenCV内置的Hough直线检测,二是自定义的直线检测算法。这两种方法都能在视频流中实时检测车道线,其中自定义方法可能具有更强的抗干扰能力。
在实际应用中,系统需考虑光照变化对检测的影响。比如,当光线条件改变时,固定阈值的二值化可能导致车道线丢失。此外,破损的道路或复杂的环境可能使检测变得困难。
尽管目前的系统存在参数固定的问题,作者提出了一种改进策略,即动态调整参数以适应不同的环境条件,如通过扫描ROI图像并实时更新关键参数。这种方法有望提高系统的适应性和鲁棒性,使其能在更多环境下准确检测车道线。
OpenCV提供了强大的工具来实现车道线检测,但实际应用需要考虑到环境因素,并通过优化参数来提升性能。未来的研究和发展将集中在如何进一步提高检测的精度和稳定性,以适应各种复杂的道路场景。
opencv车道线检测的实现方法车道线检测的实现方法
主要介绍了opencv车道线检测的实现方法,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需
要的朋友们下面随着小编来一起学习学习吧
车道线检测,需要完成以下功能:车道线检测,需要完成以下功能:
图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像
反透视变换:用的是室外采集到的视频,没有对应的变换矩阵。所以建立二维坐标,通过四点映射的方法计算矩阵,进行反透视变化。后因ROI
区域的设置易造成变换矩阵获取困难和插值得到的透视图效果不理想,故没应用
二值化:先变化为灰度图,然后设定阈值直接变成二值化图像。
形态学滤波:对二值化图像进行腐蚀,去除噪点,然后对图像进行膨胀,弥补对车道线的腐蚀。
边缘检测:canny变化、sobel变化和laplacian变化中选择了效果比较好的canny变化,三者在代码中均可以使用,canny变化效果稍微好一点。
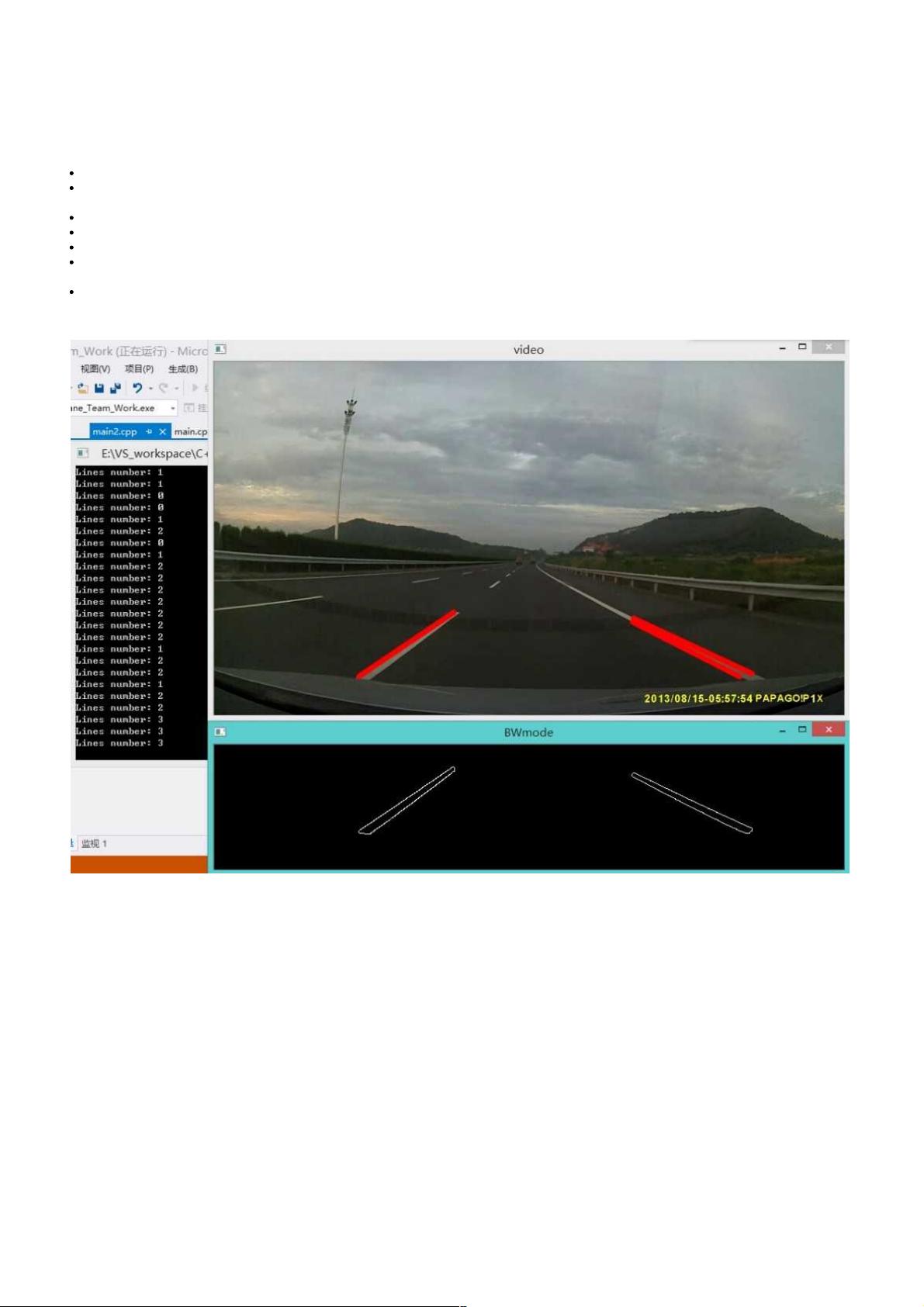
直线检测:实现了两种方法 1>使用opencv库封装好的霍夫直线检测函数,在原图对应区域用红线描出车道线 2>自己写一种直线检测,在头文件
中,遍历ROI区域进行特定角度范围的直线检测。两种方法均可在视频中体现,第一种方法运行效率较快。
按键控制:空格暂停,其余键退出,方便调试和截图。
实现的效果
在亮度良好道路条件良好的情况下,检测车前区域的车道线实现比较成功,排除掉高速护栏的影响,而且原图像还能完整体现。
下载后可阅读完整内容,剩余7页未读,立即下载
2020-12-21 上传
点击了解资源详情
2020-11-23 上传
332 浏览量
2023-07-10 上传
2023-05-31 上传
2021-08-18 上传

weixin_38663973
- 粉丝: 2
- 资源: 941
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
