惯性导航基础解析:定位与定向技术
版权申诉
139 浏览量
更新于2024-07-01
收藏 2.91MB PPTX 举报
"导航原理:第3讲-惯性导航基础概念1.pptx"
惯性导航是一种基于物理学原理的自主导航技术,它不依赖外部信号,而是通过测量载体相对于惯性坐标系的运动来确定其位置、速度和姿态。惯性技术在海、陆、空、天各领域的导航、制导与控制中发挥着核心作用,是现代武器系统的重要组成部分,其优点在于实时、自主、连续、隐蔽、不受干扰且可全天候工作。
1、什么是惯性导航
惯性导航系统(INS)主要由惯性敏感元件——陀螺仪和加速度计组成。这些元件能够感知载体的旋转和线性加速度,进而推算出载体的位置、方向和速度。惯性导航的基本思想是利用牛顿力学定律,即在惯性空间中,如果没有外力作用,物体将保持其初始运动状态。因此,通过测量载体在惯性参考系中的运动,可以预测其在地球表面的位置。
2、惯性导航力学基础
惯性空间是一个理论上的参考框架,它符合牛顿的三个运动定律。在实际应用中,由于不存在绝对的惯性参考系,我们通常选择接近惯性的参考系,如日心惯性系和地心惯性系。
- 日心惯性系:考虑到太阳围绕银河中心的公转,其角速度和向心加速度非常小,远小于现代惯性元件的测量精度,因此可以视为近似的惯性参考系。
- 地心惯性系:地球的公转和自转速度相对较大,对于高精度的惯性元件来说,地球中心参考系不再适用。但在某些情况下,如果只关注物体相对地球的运动,可以近似地将其视为惯性参考系。
3、惯性参考系的选择
在实际应用中,惯性导航系统通常基于地心惯性系,但由于地球的运动,需要通过补偿算法来修正由此产生的误差。随着技术的进步,例如光纤陀螺仪和高精度加速度计的发展,惯性导航系统的精度得到了显著提高。
惯性导航是一种复杂而精确的技术,它利用物理定律来实现自主定位和定向,是现代导航技术中不可或缺的一部分。广泛应用于航空、航天、航海、军事和地质勘探等领域,为各类移动平台提供可靠的导航信息。
导
导
航
航
原
原
理
理
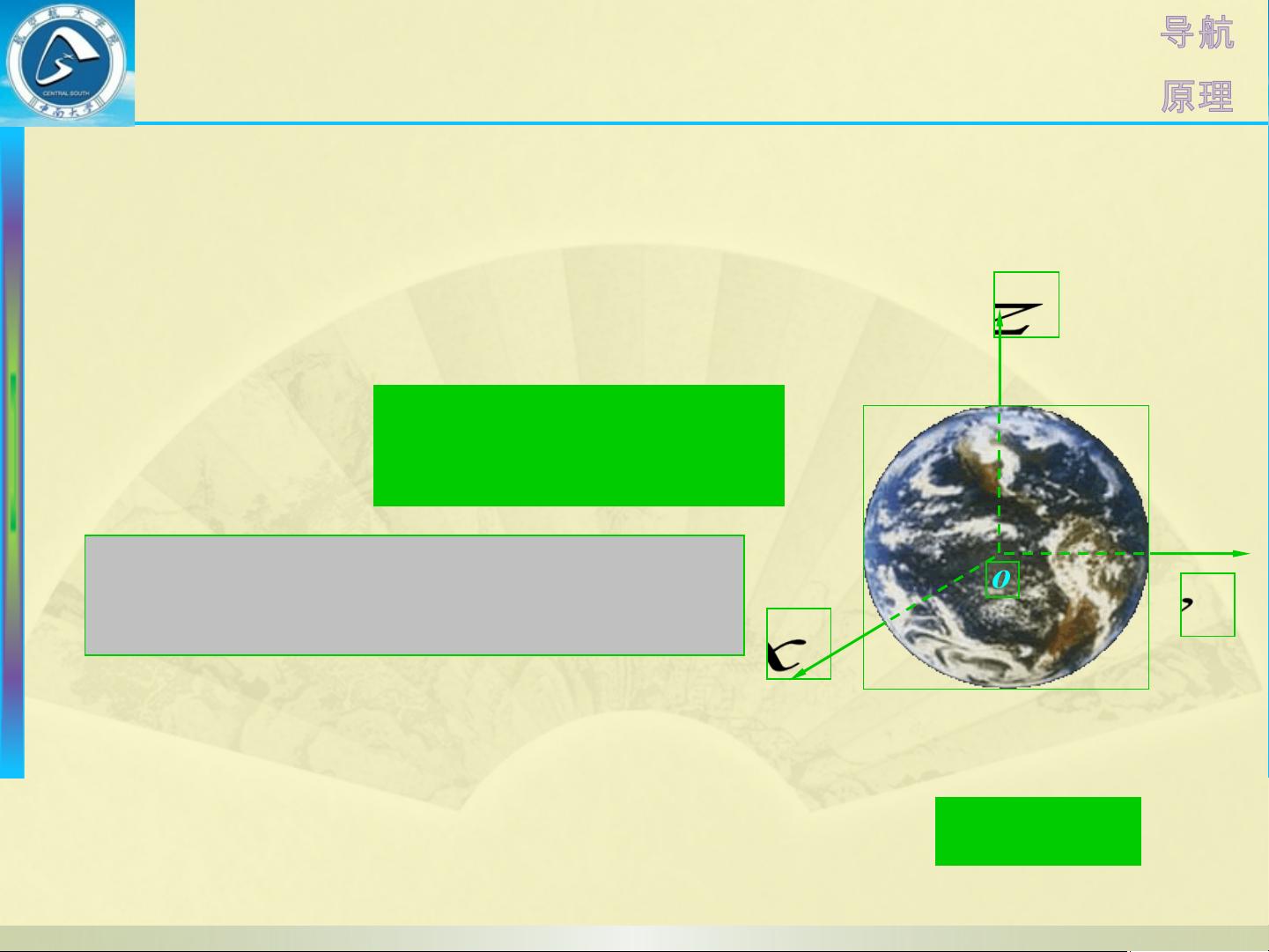
-- 地心惯性系:
地球公转角速度为: 2.0 �10
-7
rad /s
公转向心加速度为: 6.0 �10
-3
m/s
2
在惯性元件所能测量的最小角速度和加速
度的范围之内。所以,一般情况下,地球
中心参考系不能看作惯性坐标系。
什么情况下可以看成惯
性参考系呢?
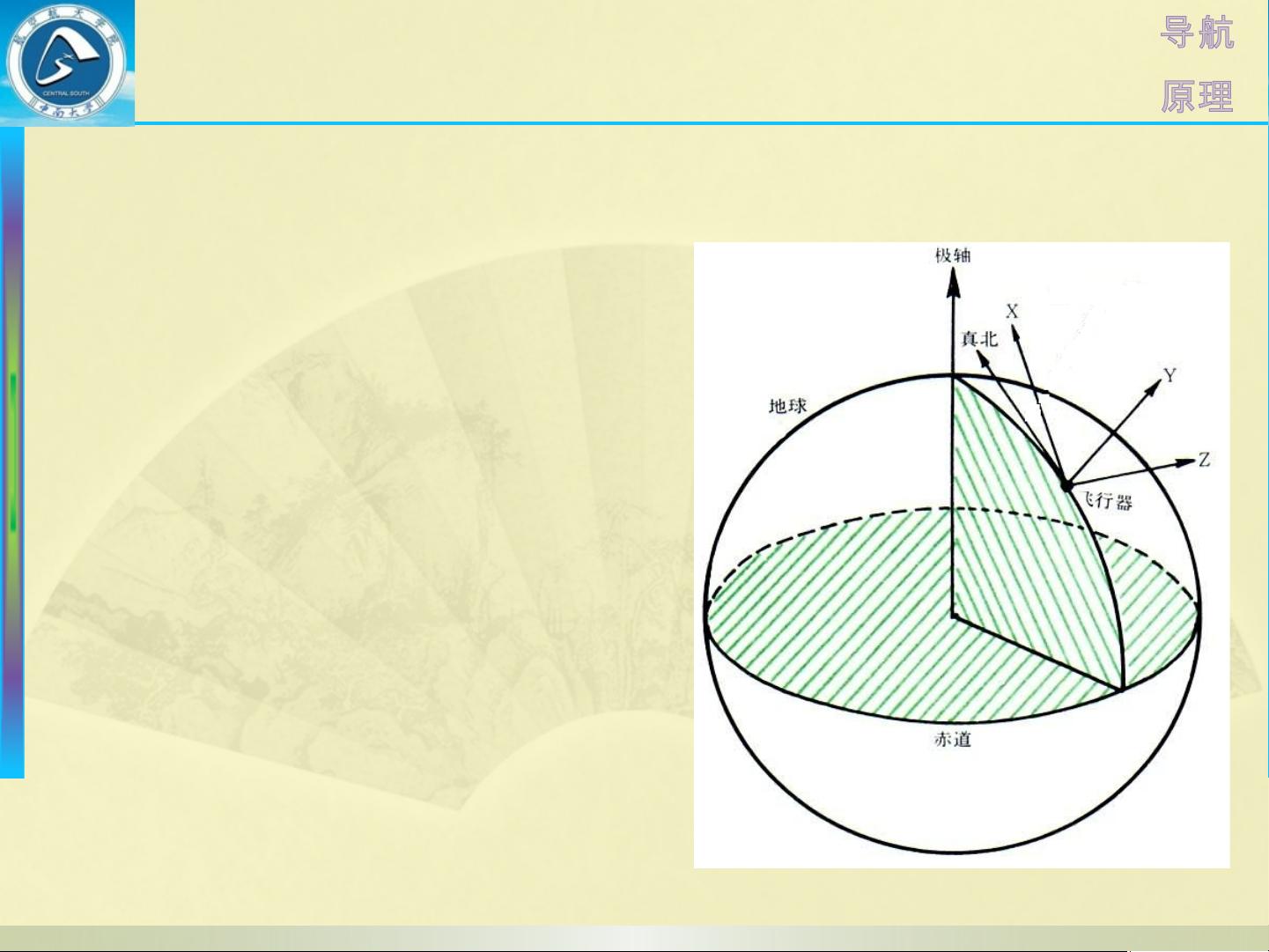
当一个物体在地球附近运动时,只关心
物体相对地球的运动。
如舰船惯性导航系统,此时要同时忽略太
阳等星体的引力和地球中心的平移加速
度。在此种惯性系下,物体受到的引力只
有地球的引力。
地心惯性系
2、惯性导航力学基础
惯性参考系
剩余55页未读,继续阅读
233 浏览量
2022-07-12 上传
2021-10-04 上传
2021-10-06 上传
2021-10-11 上传
2021-10-11 上传

wxg520cxl
- 粉丝: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- Saber仿真下的简化Buck环路分析与TDsa扫频
- Spring框架下使用FreeMarker发邮件实例解析
- Cocos2d捕鱼达人路线编辑器开发指南
- 深入解析CSS Flex布局与特性的应用
- 小学生加减法题库自动生成软件介绍
- JS颜色选择器示例:跨浏览器兼容性
- ios-fingerprinter:自动化匹配iOS配置文件与.p12证书
- 掌握移动Web前端高效开发技术要点
- 解决VS中OpenGL程序缺失GL/glut.h文件问题
- 快速掌握POI技术,轻松编辑Excel文件
- 实用ASCII码转换工具:轻松实现数制转换与查询
- Oracle ODBC补丁解决数据源配置问题
- C#集成连接器的开发与应用
- 电子书制作教程:你的文档整理助手
- OpenStack计费监控:使用collectd插件收集统计信息
- 深入理解SQL Server 2008 Reporting Services
