小车单摆系统动力学建模与控制器设计
小车单摆系统控制器设计是基于倒立摆技术的一种经典控制系统研究,主要涉及动力学建模、能控性和能观性分析以及稳定控制策略的设计。本文的核心内容如下:
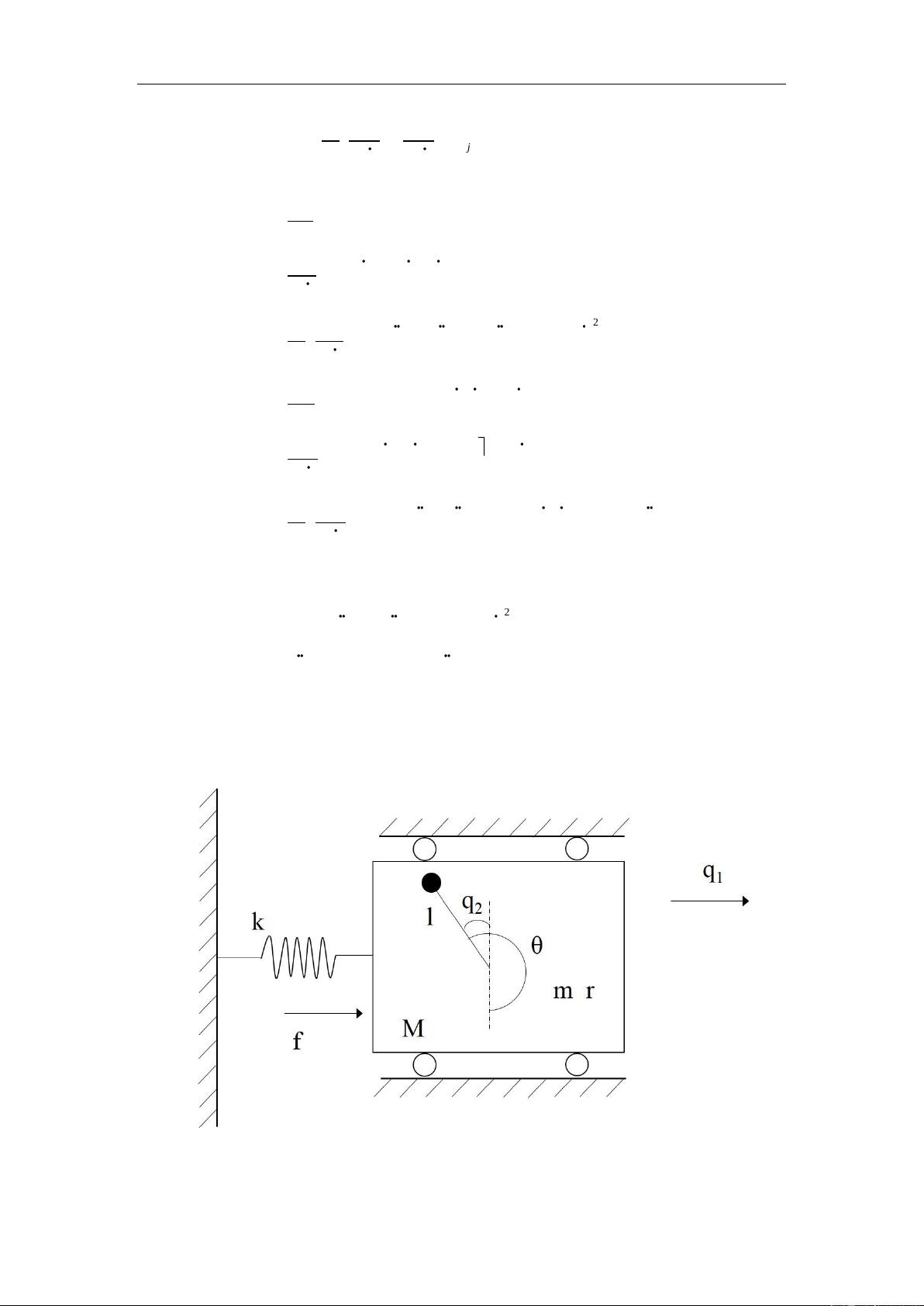
1. 动力学建模:系统由一个小车(质量M=5kg)和一根刚度k=50N/m的弹簧连接到墙壁,一个质量m=0.5kg的钢球通过铰接在小车上,杆长l=0.3m,构成一个倒立摆系统。系统使用小车位置q1和摆动角度q2作为广义坐标。通过计算得到小车的速度v1和摆的速度v2,以及动能T1和T2,包括小车和摆的机械能。拉格朗日函数L定义了系统的总能量,考虑到小车和摆的动能及势能。
2. 稳定性分析:研究了系统在小车内的倒立摆稳定状态下的能控性和能观性。能控性是指系统能否通过外部输入(如力f)完全控制系统的状态,能观性则是指系统状态能否被外部测量完全观察。通过对系统拉格朗日方程的求导和设定外力f,分析了系统固有的自然频率,这对于确保稳定性至关重要。
3. 起摆过程控制:文章关注如何通过合理的力f来实现小车内部摆的起摆,目标是使摆动达到180度并保持稳定。这涉及到对力f的精确计算和控制策略的设计,以克服初始静止状态下的惯性,并在摆动过程中维持动态平衡。
4. 拉格朗日方程的应用:作者运用拉格朗日方程(
1,2)
j
j
j
d
L
L
Q
j
dt
q
q
-
∂L/∂q
-
∂L/∂q
=
∂L/∂q̇
-
∂L/∂q̈
)的形式来推导动力学方程,其中Q表示广义坐标和它的导数,f是外力的表达式。在这个过程中,还涉及到一些物理量的三角函数关系,如cos和sin。
本文的主要任务是通过建立和分析拉格朗日动力学模型,设计出能够有效控制小车单摆系统,使其能够在稳定状态下起摆并保持预定角度的控制器。这种技术在机器人技术、航空航天等领域有着广泛的应用前景。
- 3 -
代入拉格朗日方程:
( ) ( 1,2)
j
jj
d L L
Qj
dt
qq
,又
12
,0Q f Q
,所以有
1
1 1 2 2
1
2
1 1 2 2 2 2
1
2 1 2 2
2
2
2 1 2 2
2
2
2 1 2 1 2 2 2
2
0,
cos ,
( ) ( cos sin ),
sin sin ,
cos ,
( ) m cos sin
L
q
L
M q mq q l q
q
dL
M q mq m l q q l q q
dt
q
L
mgl q mq q q
q
L
m l q q l q I q
q
dL
l q l q q l q q q I q
dt
q
代入得,
2
1 2 2 2 2 1
2
1 2 2 2
( ) cos sin
cos ( ) sin 0
M m q ml q q ml q q kq f
ml q q ml I q mgl q
(1)
式(1)即为该系统的运行微分方程。
2.1 倒立摆的稳定性分析
当摆处在稳定状态,如下图 2 所示。
图 2 倒立摆示意图
取
2
q
,状态方程为
剩余14页未读,继续阅读
1114 浏览量
2024-10-26 上传
2024-10-26 上传
231 浏览量
108 浏览量
152 浏览量
2021-07-26 上传

rcxicool
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
