模块化SPAD直接飞行时间深度传感器在宽动态范围LiDAR系统中的分析
需积分: 0 112 浏览量
更新于2024-08-04
收藏 1.64MB PDF 举报
"这篇论文分析了一种基于SPAD(单光子雪崩二极管)的模块化直接飞行时间深度传感器架构,适用于具有宽动态范围的场景中的激光雷达系统。作者探讨了这种技术的高速度、长距离精确测距以及在高背景噪声环境下的鲁棒性优势。"
在激光雷达(Light Detection and Ranging,LiDAR)系统中,对深度感知的需求日益增长,推动了直接飞行时间(Direct Time-of-Flight, DTOF)成像传感器的发展。这些传感器利用时间相关单光子计数(Time-Correlated Single-Photon Counting, TCSPC)技术,能在长距离和高背景噪声条件下实现快速且精确的距离测量。
DTOF传感器的工作原理是通过发射周期性的光源(通常是脉冲激光器)到目标物体,然后由高性能的光子探测器——SPAD来检测反射光子的到达时间。SPAD是一种特殊的光电探测器,它能在一个光子撞击时引发雪崩效应,从而实现单光子级别的敏感度。在DTOF系统中,通过测量光子从发射到接收的时间差,可以计算出目标的距离,因为光速是已知的。
本研究论文由Preethi Padmanabhan、Chao Zhang和Edoardo Charbon共同撰写,他们分别来自瑞士洛桑联邦理工学院的先进量子架构实验室(AQUA)和荷兰代尔夫特理工大学的应用量子架构实验室。作者们探讨了如何设计一个模块化的SPAD传感器架构,以适应具有宽动态范围的场景,这在实际应用中非常重要,因为环境光照条件可能有很大差异,从阳光直射到黑暗环境。
电话联系方式提供给了主要作者,以便进一步的技术讨论或合作。论文的介绍部分强调了DTOF技术的优势,并暗示了在激光雷达系统中的潜在应用,比如自动驾驶汽车、无人机导航、三维重建和工业自动化等领域。
通过深入分析SPAD的性能和优化其在DTOF系统中的应用,这篇论文将为理解和改进LiDAR系统的深度测量能力提供宝贵的见解。此外,模块化的设计可能允许更灵活地适应不同的系统需求,如探测距离、精度和功耗。这项工作不仅对研究人员和工程师有重要的理论价值,也将对开发下一代高性能、低噪声的激光雷达系统产生实际影响。
Analysis of a modular SPAD-based direct time-of-flight depth sensor
architecture for wide dynamic range scenes in a LiDAR system
Preethi Padmanabhan
1
, Chao Zhang
2
and Edoardo Charbon
1,2
1. Advanced Quantum Architecture Laboratory (AQUA), EPFL, Neuchâtel, Switzerland
2. Applied Quantum Architecture Laboratory (AQUA), Delft University of Technology, The Netherlands
Email: preethi.padmanabhan@epfl.ch, c.zhang-10@tudelft.nl, edoardo.charbon@epfl.ch
Phone: +41216954413, +31626585961, +41216954409
I. I
NTRODUCTION
The growing need for depth sensing has significantly driven
light-detection and ranging (LiDAR) systems in a wide range
of applications. Direct time-of-flight (DTOF) image sensors
based on time-correlated single-photon counting (TCSPC) are
being actively explored for their high speed and accurate
ranging capabilities over long distances and robustness to high
background noise. In a DTOF sensor, depth sensing is achieved
by transmitting a periodic light source (typically a pulsed laser,
also considered in this work) to a target and detecting the time-
of-arrival of the reflected photons by a high performance
photodetector such as avalanche photodiodes (APDs), single-
photon avalanche diodes (SPADs) or silicon photomultipliers
(SiPMs) and supporting electronic circuitry to measure the
time-of-flight. Time-to-digital converters (TDCs) are typically
used for this purpose [1-3, 6-9].
There are various challenges in acquiring a quality LiDAR
measurement among them being robustness to ambient light, an
eye-safe illuminator, wide dynamic range targets, adverse
weather conditions, interference in a multi-LiDAR scenario,
etc. Ambient light suppression has been addressed by
coincidence detection on chip [2, 6, 7], a well-known technique
utilizing spatio-temporal closeness of photons within a laser
pulse to filter out background noise photons. While TCSPC
with coincidence detection have shown effective noise-filtering
properties, imaging in a wide dynamic range scenario is an
ongoing challenge. The work in [7, 9] addresses this by
implementing variable coincidence thresholds. In this paper, we
address the issues of a wide-dynamic range scene by proposing
a modular SPAD-based DTOF sensor in a shared architecture
based on coincidence and pixel clustering. While keeping
modularity and sharing at the core of the sensor architecture [3,
4], this paper extends it towards a more robust solution to
DTOF-based sensors by proposing:
1. tunable coincidence detection based on photon activity
including the address/ID map of the contributing pixels within
a coincidence event,
2. multiple timestamping within a shared architecture and
enhancing data throughput,
3. modular gating mechanism to configure pixels around the
range of interest, all of which can be performed simultaneously.
The proposed DTOF scheme is studied in a flash LiDAR setup
by developing an analytical model on MATLAB supported by
simulation results explaining the advocated concepts.
II.
FLASH
L
IDAR SYSTEM
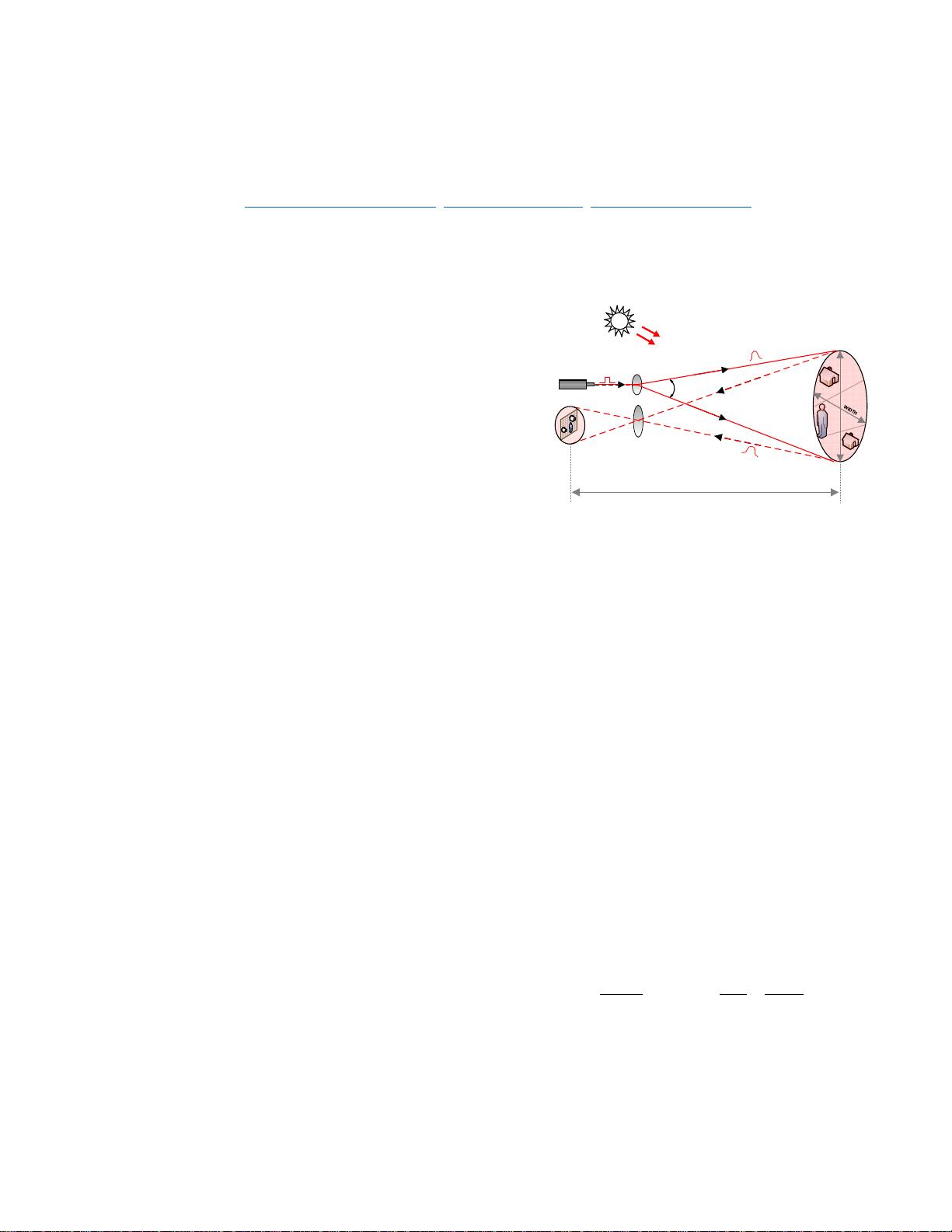
In a flash LiDAR the target scene (_) is uniformly
illuminated with a wide angle laser beam, shown in Figure 1
with horizontal and vertical fields of view (FOV) denoted as
'θ
H
' and 'θ
V
' respectively. The distance to a target plane is
denoted as 'd'. The back-reflected photons from the target are
then detected by the SPAD sensor collected through a
Figure 1: Conceptual Flash LiDAR system diagram.
receiving lens with a diameter, D = 21mm, f-number of 1.4 and
aperture area,
. Due to the fact that the entire scene is
illuminated at once, a sensor with an array of pixels is preferred
in order to reconstruct the target scene with a given spatial
resolution [8, 9]. Figure 2 shows the simulation results on a
SPAD array with a spatial resolution of 3232 pixels used to
detect photons reflected from a 40% reflectivity () flat target
(Lambertian) at distances varying over 1-50m and
and
being 45º each. The average power,
, of the laser is 10mW
at a wavelength () of 905nm (preferred choice for LiDAR) and
repetition rate (
) of 2MHz is assumed. The ambient light
condition is assumed to be 50klux. A bandpass filter with a full-
width-at-half-maximum (FWHM) of 15nm centered around
905nm has been considered. A sub-micron SPAD device with
a photon detection probability () of 5% at 905nm, a fill
factor () of 50%, a temporal jitter of 100ps FWHM and a
dead time (
) of 8ns has been considered for simulations. The
effect of dark count rate () of the SPADs has not been
considered for simulations here, given that it is much lower than
the ambient light activity which is a dominant source of noise.
The number of events being detected per pixel per second are
estimated for signal as well as the noise photons using standard
equations as shown below [10-12]. For the returning signal
photons,
#_
#
. (1)
Here,
is the energy of a photon (
⁄
) at 905
and , is the transmission factor representing the lens
efficiency (80%), PDE is the photon detection efficiency
Diffuser
Lens
Target area
SPAD-based
DTOF sensor
Pulsed
laser
Returning pulse
from the target
Out going pulse
towards the target
Distance ‘d’ to the target plane
HEIGHT
θ
H
,θ
V
Ambient light
R27
下载后可阅读完整内容,剩余3页未读,立即下载
2010-05-18 上传
2021-04-14 上传
2020-01-10 上传
2021-07-13 上传
2010-01-05 上传
2021-02-21 上传
2021-02-10 上传
2023-02-07 上传
2021-04-24 上传

强强徐
- 粉丝: 598
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
