基于51单片机的自动巡线轮式机器人控制系统设计
PDF格式 | 249KB |
更新于2024-08-29
| 136 浏览量 | 举报
"单片机与DSP中的单片机自动巡线轮式机器人控制系统设计"
本文主要探讨了基于51型单片机的自动巡线轮式机器人的控制系统设计,该系统集成了机械、电子和智能控制技术,适用于各种环境下的自主导航任务。轮式移动机器人的优势在于其灵活的移动速度和方向控制,使其成为广泛应用的移动平台。
控制系统由以下几个关键模块构成:
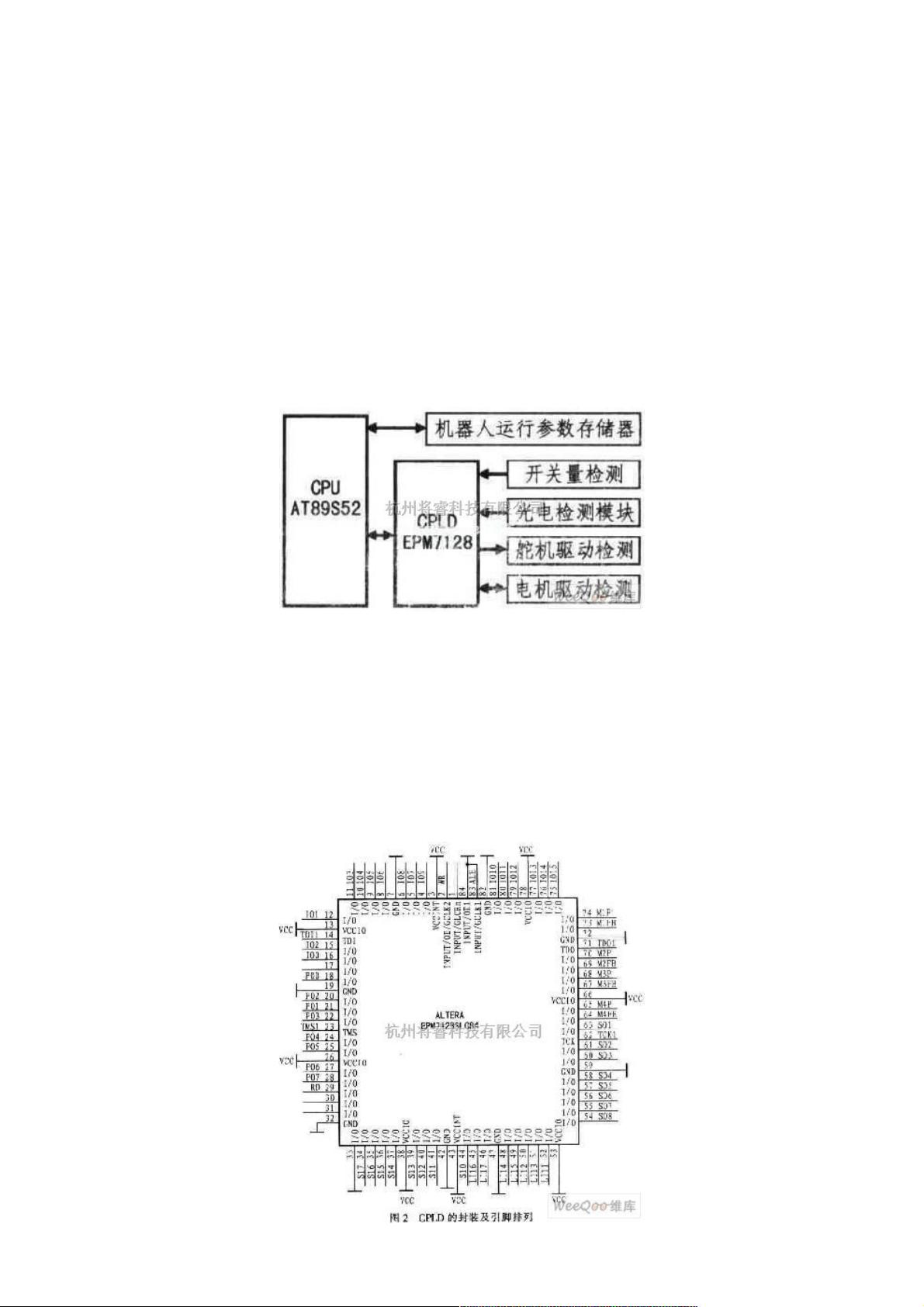
1. 主控制电路模块:这是整个系统的核心,通常由单片机如AT89S52来执行高级决策和控制算法。在这个案例中,为了减轻单片机的负担,采用了CPLD(复杂可编程逻辑器件)扩展,以处理电机控制、PWM信号生成以及光电检测等功能。
2. 存储器模块:用于存储程序代码和运行数据,确保机器人能够根据预设指令进行操作。
3. 光电检测模块:通过光电传感器检测机器人路径上的线条或其他标志,提供实时的环境信息,帮助机器人确定位置和行驶方向。
4. 电机及舵机驱动模块:控制机器人的移动和转向。CPLD产生的PWM信号可以调节电机的速度,而M1FB-M4FB引脚则用于控制电机的方向。
5. CPLD设计:EPM7128 CPLD用于扩展单片机的功能,其内部结构允许快速控制电机和输入输出信号,同时通过编程(如VHDL语言)实现特定功能,例如PWM信号的生成。
6. 硬件接口:如图2所示,CPLD的引脚连接到单片机的I/O口,以及其他传感器和执行器,如行程开关和光电探头,形成一个完整的控制系统网络。
7. 时钟频率:单片机采用24MHz的晶振,提供了6MHz的ALE信号频率,这对于高速数据处理和实时控制至关重要。
这个系统的设计和开发旨在实现高效、准确的轮式机器人自动巡线功能,为机器人控制系统的研究提供了基础。通过这样的系统,可以深入研究和优化运动规划算法,提升机器人的自主导航能力。此外,CPLD的使用展示了如何通过硬件扩展来增强微控制器的功能,以适应复杂的控制任务需求。
单片机与单片机与DSP中的单片机自动巡线轮式机器人控制系统设计中的单片机自动巡线轮式机器人控制系统设计
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移
动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和
移动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计
和开发了基于51型单片机的自动巡线轮式机器人系统。 2 控制系统总体设计 机器人控制系统由主控制
电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。 控
制系统的框图 3 主控制模块设计 3.1 CPLD设计 在机器人控制系统
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,
轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研
制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于51型单片机的自动巡线轮式
机器人系统。
2 控制系统总体设计
机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图
1所示。
控制系统的框图
3 主控制模块设计
3.1 CPLD设计
在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任务都由AT89S52型单片机来
完成.CPU的负担就会过重。影响系统的处理速度。因此扩展1个CPLD.型号为 EPM7128。它属于.MAX7000系列器件。
包括2个通用1/0口.2个专用I/O口,专用I/O口可作为每个宏单元和输入输出引脚的高速控制信号 (时钟、清除和输出使能
等),电动机的。PWM信号也由其产生。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐




weixin_38631960
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- STM32F103控制12864液晶显示屏基础图形绘制教程
- 慧荣SM32x_H0821量产工具使用指南
- 逆流水冷却塔设计App:计算冷却塔高度与最小空气流量
- 计算机实习报告精选:实习心得与技巧分享
- 掌握NiosII开发:全面范例解析
- 分步下载与整合Windows 10版MySQL 5.7.26
- Cisco 3800路由器硬件问题故障排除全攻略
- 正交最小二乘法在Matlab中的实现与应用
- 快速掌握Linux系统安装与分区
- MATLAB编程90个实例详解:基础与实用技巧
- 室内设计培训网站模板设计,5页面全站适用
- 多项式基函数回归在Matlab中的实现方法
- 掌握Java:150例应用编程示例
- JSP与mysql打造动态电子相册系统
- TCP/UDP网络编程学习工具:多链接服务器与客户端实现
- 基础Android学生信息管理系统开发指南











