库卡KRC4机器人首次启动与软硬件设置详解
需积分: 43 23 浏览量
更新于2024-09-07
1
收藏 960KB PPT 举报
库卡KRC4系列机器人首次开机启动软硬件设置是一项关键任务,确保正确操作对机器人性能和系统稳定性至关重要。以下是针对初次使用该系列机器人的详细步骤:
1. **电池连接**:在开机前,确认电池电源线X305已正确插入,这是启动过程中必不可少的电源来源。
2. **机器人本体接线检查**:检查电机电缆、刹车线(X31编码器线)连接是否牢固,这些线缆的正常工作直接影响机器人的动作精确度。
3. **控制柜接线**:检查1XS1电源接口、2X7.1附加轴接口(如焊钳或行走轴)、3X20驱动电机接口(轴1-6),以及11X21RDC接口,确保所有接口无误并连接到位。
4. **安全回路与操作模式**:在主电源开关打开后,注意首次开机时间较长,要耐心等待。在10X19smartPAD接口处,可通过安全回路进行切换,可选择投入运行手动机器人模式。
5. **KCP急停处理**:初次开机时,KCP的急停按钮是按下状态,顺时针旋转后拔起,解除紧急停止功能。
6. **系统初始化**:屏幕上可能会显示RDC存储器和控制系统不一致的信息,这表明可能存在系统更新或替换。使用按键机器人确认,并选择“网络配置已还原”选项。
7. **菜单配置**:进入菜单系统,按照提示进行用户组设置,通常选择safety和recovery,输入密码KUKA。然后进入菜单序列配置>安全配置,进行故障排除。
8. **故障排除与保存**:在故障排除助手中,识别“机器人或RDC存储器首次投入运行”这一选项,点击激活,随后关闭通用窗口。确认已成功保存更改,再次用按键OK确认。
9. **硬件选项选择**:进入硬件选项,这将展示下一个页面,包括安全配置选项,这里可以进一步定制机器人的特定硬件设置,以适应具体应用需求。
在整个启动过程中,严格按照步骤操作,确保每个环节的正确执行,以避免潜在的问题和提高工作效率。同时,熟悉这些设置有助于日常维护和问题诊断,对于提升库卡KRC4系列机器人的稳定性和可靠性极为重要。
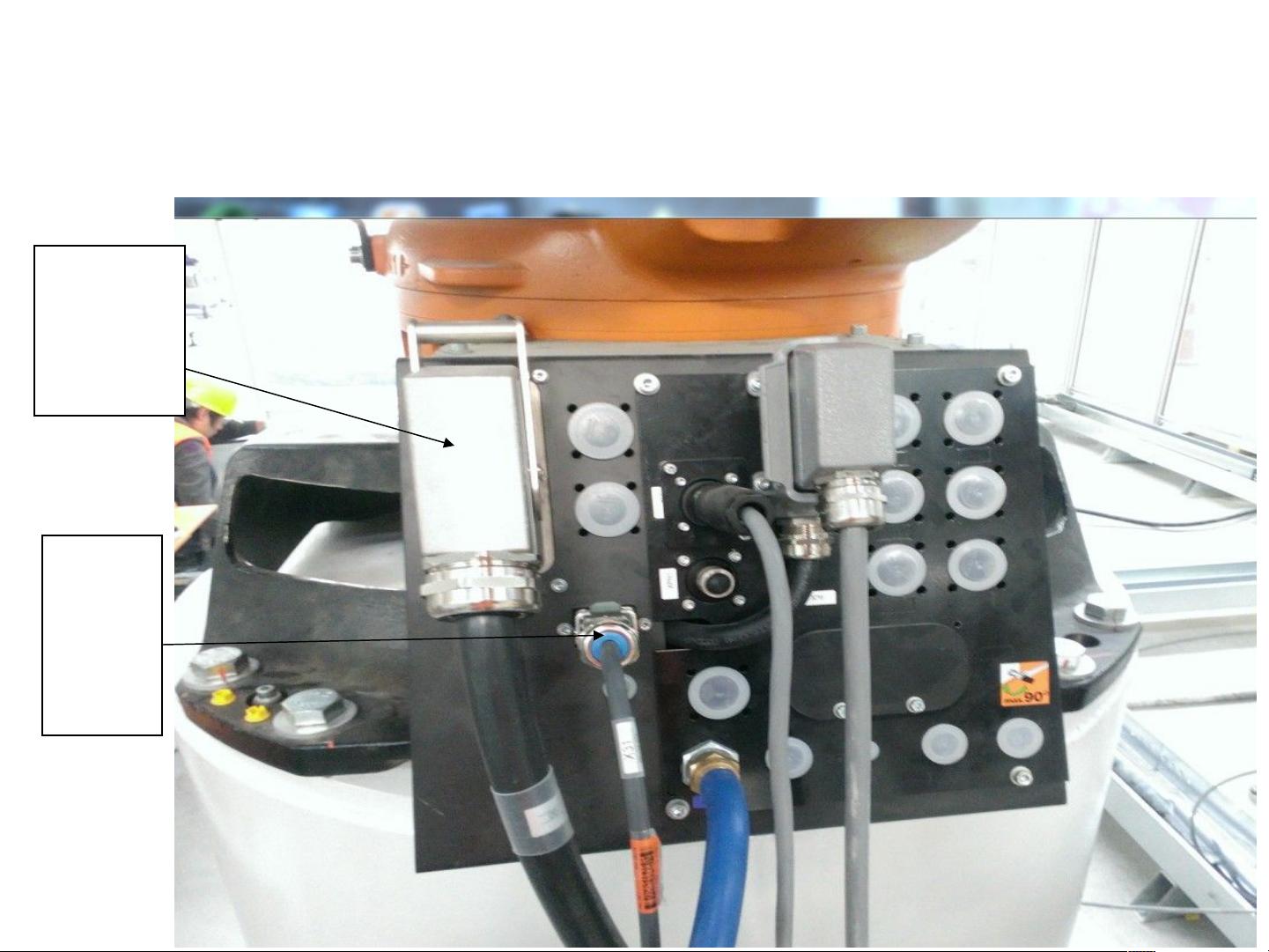
检查机器人本体接线,
电机电
缆及刹
车线
X31
编码
器线
剩余11页未读,继续阅读
332 浏览量
192 浏览量
点击了解资源详情
152 浏览量
117 浏览量


yyh8441
- 粉丝: 10
- 资源: 48
 我的内容管理
展开
我的内容管理
展开







最新资源
- c程序,脑电数据处理,包括预处理,能量特征提取,fisher分类
- leetcode-solutions:流行的Leetcode问题的解决方案和学习资源
- 2013年述职述廉述学报告
- Auto Form Filler-crx插件
- 包文件结构
- 钉钉 For Mac_v5.0.11.0
- 电信设备-具备利用多个通信线路的DNC运转功能的数值控制装置.zip
- Java版QQ签到源码-dgc-gateway:dgc网关的存储库
- nodejs-course
- 银行员工年度考核总结
- C#中picturebox的图像拼接
- SwapSpace:一款类似58同城的app
- matlab的slam代码-ICIEA2018_IEKF_LeastSquare_Comparison:这是我论文中模拟的Matlab代码:基
- 中国茶文化主题网站模板
- goretube.github.io
- djembedb-react
