逆运动学解:二维机械手臂姿态求解策略
需积分: 38 96 浏览量
更新于2024-09-09
2
收藏 184KB PDF 举报
机械手臂的逆运动学解是一种关键的技术,它与正运动学分析相对,正运动学是确定末端执行器姿态的过程,而逆运动学则是反过来,即在给定末端执行器的位置和朝向时,找出各个关节的相应角度。这个过程在机器人控制中尤为重要,因为它允许我们控制关节运动以精确地定位手臂。
逆运动学的基本思路是从末端执行器的位姿(包括位置坐标x、y和朝向α)出发,推导出关节角度。在实际应用中,由于机械臂的三维运动通常包含多个关节,如常见六轴机械臂,问题会变得复杂。为了简化理解,我们可以先假设忽略下方云台的旋转关节,将问题限制在二维平面上进行分析,此时关节角度用θ1、θ2和θ3表示。
方程(1)和(2)是基于末端执行器的坐标和关节角度的关系,它们描述了末端执行器在直角坐标系下的投影。通过将末端执行器的朝向α与关节角度相结合,形成方程(3)。然而,这种方法并非通用,因为对于不同的机械臂结构,可能需要特定的处理方式。
为了进一步简化计算,引入新的变量n,使得方程(4)和(5)只涉及基本的三角函数。这样做的目的是为了提高计算效率,使得逆运动学能够在实时控制环境中得以实现。在实际应用中,可能会结合数值方法或优化算法来求解这些方程,确保找到最优的关节角度组合。
值得注意的是,尽管几何法在某些简单模型中的表现直观且易于理解,但对于复杂机械臂,特别是具有多个连杆和非直角关节的情况,DH参数(Denavit-Hartenberg参数)模型提供了更为通用的方法,可以处理各种机械臂结构。通过DH模型,我们可以建立一个通用的框架,解决不同类型的逆运动学问题,即使面对超出直观理解的复杂情况也能游刃有余。
机械手臂的逆运动学解是机器人控制系统中的核心算法之一,它利用几何和代数工具来转换末端执行器的运动目标为关节的控制信号,对于实现精确定位和灵活操作至关重要。在实际设计和控制中,需要根据机械臂的具体结构选择合适的分析方法,以确保高效、准确的运动控制。
1
机械手臂的逆运动学解
正运动学分析是已知每个关节的姿态的前提下,解算出末端执行器的姿态。
而逆运动学研究的问题是,要求控制末端执行器到达某一位置时,各关节应处于
什么姿态。
1.逆运动学概述
逆运动学最基本的思路,是从正运动学反过来,对于我们的机械臂而言,也
就是已知末端执行器的位置和朝向,求每个关节的角度。我们的机械臂的三维运
动是比较复杂的,这里为了简化模型更加便于大家的理解,我们对模型进行精简,
先去掉下方云台的旋转关节,这样就可以在二维的平面上进行运动学分析了。
其中
210
,,
是各个关节的角度,未知量。
),,x(
yP
是末端执行器的位姿表
示,x 和 y 是在 OXY 平面的坐标,
是末端执行器的朝向。一般我们看的文章,
计算运动学分析那都是一大堆的矩阵变换,实际上那些算法在单片机上执行是比
较费时的,甚至可以说是无法满足实时控制的。适合在 matlab 上面运算。所以,
我们需要寻找一种高效的方案,以满足我们实时控制的需要。下面我们将使用几
何法进行分析。
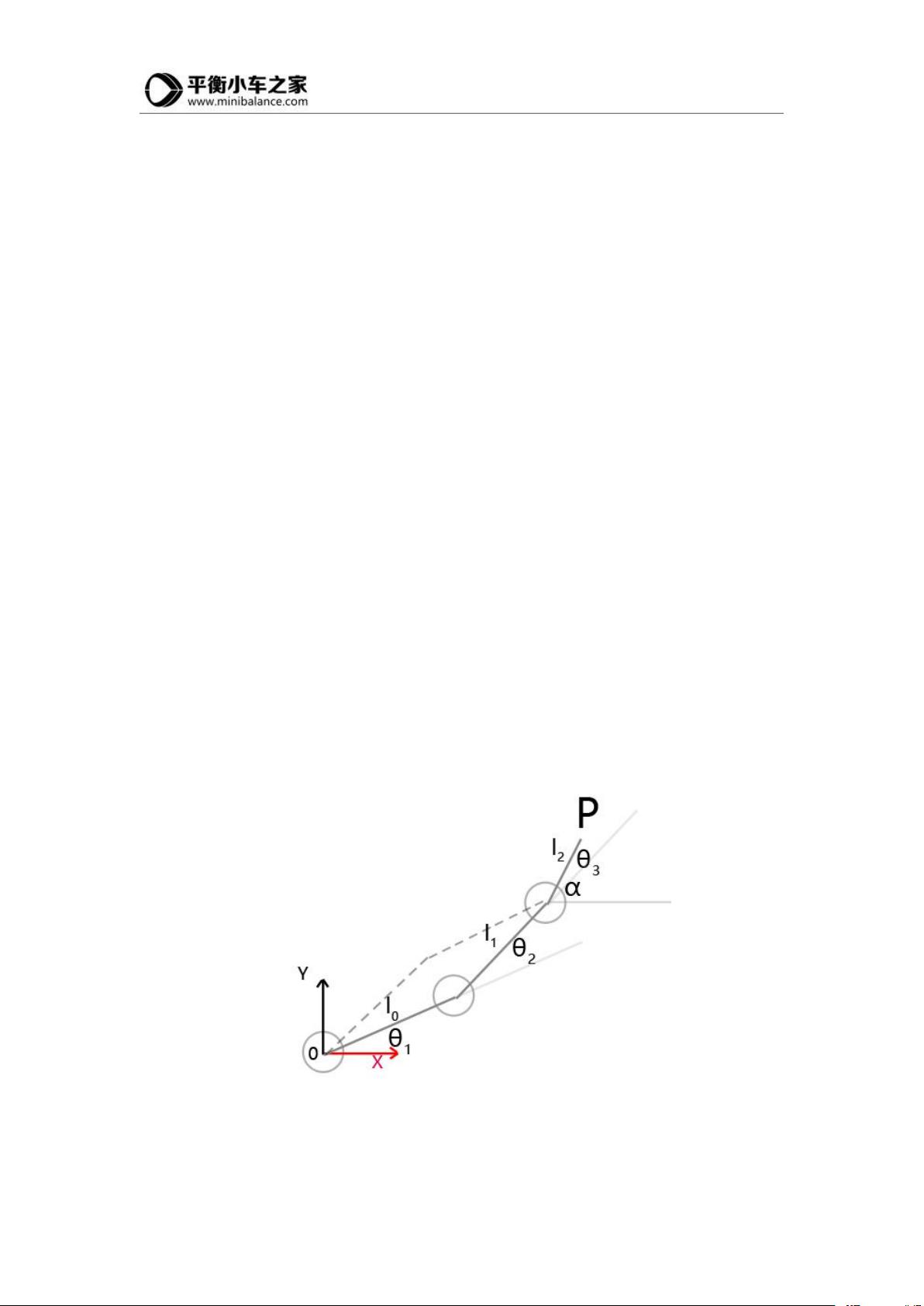
图 1.机械臂的几何表示
根据上面的图示,很容易列出如下方程:
)cos()cos(cosx
321221110
lll
(1)
下载后可阅读完整内容,剩余3页未读,立即下载
2020-08-13 上传
2021-05-31 上传
2021-03-25 上传
2024-10-19 上传
2023-11-08 上传
2023-10-20 上传
2023-05-17 上传
2024-09-28 上传
2024-11-24 上传

tumuquan3
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
