多阶段伞翼系统归航优化控制与路径规划
186 浏览量
更新于2024-08-31
收藏 1.59MB PDF 举报
“多阶段伞翼系统归航优化控制方法”
本文介绍了一种针对伞翼系统归航规划的优化控制策略,该策略包括多阶段归航布局、使用遗传算法(GA)进行最优归航路径计算以及基于贝塞尔曲线的伞翼终端引导路径规划,以应对不同滑翔比的情况。文章采用了L1非线性算法进行轨迹跟踪。对比仿真结果显示,L1跟踪算法在不同初始位置以及有无风干扰的情况下,具有更快的响应速度、更高的精度和更好的抗风性能,优于传统的PD跟踪算法。
I. 引言
相较于普通降落伞,伞翼系统具有良好的稳定性、出色的滑翔性能和机动性。这些特性使其在航天器回收和远程精确空投伞翼系统领域越来越受到关注,并已成为回收技术研究的重点[1]。
伞翼系统的归航控制在整个飞行过程中至关重要。早期工程应用中,通常采用径向归航方法。然而,这种方法对于应对复杂的环境变化和动态目标定位显得较为局限。因此,提出了多阶段归航安排,旨在提高归航效率和精度。
II. 多阶段归航安排
多阶段归航安排是将整个归航过程划分为若干个阶段,每个阶段根据飞行条件和目标状态调整控制策略。这种方法能够更好地适应伞翼在不同飞行阶段的不同需求,如初始阶段可能侧重于保持滑翔距离,而接近目标阶段则需考虑精确着陆。
III. 遗传算法优化归航路径
遗传算法是一种全局优化工具,适用于解决复杂优化问题。在本研究中,通过遗传算法寻找最优归航路径,可以考虑多种因素,如风速、地形和伞翼性能,以确保在各种条件下都能找到最佳路径。
IV. 贝塞尔曲线路径规划
贝塞尔曲线是一种在计算机图形学中广泛使用的参数曲线,具有平滑和可控制的性质。在伞翼终端引导中,利用贝塞尔曲线规划路径,可以实现平滑过渡,减少因突然转向引起的空气动力学阻力,从而提高归航效率。
V. L1非线性算法的轨迹跟踪
L1非线性算法因其对扰动的鲁棒性和快速收敛特性,被用于伞翼系统的轨迹跟踪。与传统的PD控制器相比,L1算法能更快地响应环境变化,保持跟踪精度,同时在风力干扰下表现更优。
总结起来,该研究提出了一套综合的伞翼系统归航控制方案,通过多阶段规划、遗传算法优化路径以及L1非线性算法的轨迹跟踪,显著提升了伞翼在复杂环境下的归航性能和准确性。这一方法对于提升伞翼系统的自主导航能力及在实际应用中的可靠性具有重要意义。
Abstract—In this paper an optimal control method for parafoil
system homing planning is introduced, which includes
multi-phase homing arrangement, optimal homing path
calculation using genetic algorithm(GA), and Bezier curves
based path planning for parafoil terminal guidance to deal
with the situation of variable glide ratios. L1 nonlinear
algorithm is adopted to make trajectory tracking. Comparison
simulations results show that L1 tracking algorithm has more
rapid response speed, higher precision and better wind
resistance than PD tracking algorithm in homing path
planning with different initial positions and with or without
wind.
I. INTRODUCTION
Comparing with ordinary parachute, Parafoils have good
stability, excellent gliding performance, and maneuverability.
All these characteristics make it more and more popular in the
area of spacecraft recovery and remote control of the
precision airdrop parafoils, and it has become the focus
research of recovery technology [1].
Homing control of the parafoil system is very important in
the entire flight. In the early engineering applications, radial
homing method are generally adopted as homing control
strategies [2,3]. After 1970s, optimal control based homing
theory is developed, and Multi-phase homing control method
[1,4,5,6] is used in practical application, which simplifies the
whole process of control and make homing planning more
robust and easier.
Multi-phase homing strategy segments the entire homing
path according to different stages and characteristics of
homing process. So the parafoil homing process is divided
into three stages which are called “radial flight” “hover cutting
high” and “headwind-landing”. According to the requirements
of the parafoil system landing, parameters of each stage will
be optimized. Soppa [4], Sim [5], Jann [6] and Hogue [7] and
other scholars have studied the multi-phase homing method
using different strategies. These strategies have described
how to return to the base station with multi-phase, but the
paths are easy enough to meet every situation. Xiong Jing [1]
*Resrach supported by National Natural Science Foundation of China
(Grand No. 61528303 and 61503369).
Liying Yang is Master candidate of State Key Laboratory of Robotics,
Shenyang Institute of Automation, Shenyang, 110168, China (e-mail:
yangliying@sia.cn).
Xiaoguang Zhao is with the College Of Information Science and
Engineering, Northeastern University, Shenyang 110819, China (e-mail:
zhaoxiaoguang@sia.cn).
Feng Gu is with the State Key Laboratory of Robotics, Shenyang Institute
of Automation, CAS, Shenyang 110016, China (e-mail: gufeng@sia.cn).
Yuqing He is with the State Key Laboratory of Robotics, Shenyang
Institute of Automation, CAS, Shenyang 110016, China (e-mail:
heyuqingn@sia.cn). corresponding author
developed a novel method of multi-phase homing in which
GA is used for path planning, however, in the whole homing
process, the glide ratio is fixed and only one plan being
operated.
Multi-phase homing is the key problem of the accurate
landing of parafoil system. In this paper, a complete solution
of parafoil system homing are designed. Trajectory
optimization can be transformed into parameter optimization
so that we can use GA to solve the problem. In the air,
parafoil may be subject to a variety of disturbances, which
will cause the change of glide ratio, and parafoil cannot reach
the target point while following the path of previous planning.
Thus Bezier curves are used for re-planning in upwind
landing segment. Then L1 tracking algorithm can be used to
track the planning path and reach the target point. In this
paper, firstly, the multi-phase homing of parafoil system with
fixed glide ratio. Secondly, multi-phase homing with
non-fixed glide ratio is described. Thirdly, L1 tracking
algorithm with trajectory tracking is studied, in which its
advantages in the condition with wind is shown.
II. MULTI-PHASE HOMING OF PARAFOIL SYSTEM WITH FIXED
GLIDE RATIO
A. Description of Multi-phase homing
The parafoil homing process is divided into threee stages
which are called “radial flight” “hover Cutting high” and
“headwind-landing”. Parafoil uses different control methods
in different stages to improve the accuracy of homing and
enhance the safety of landing.
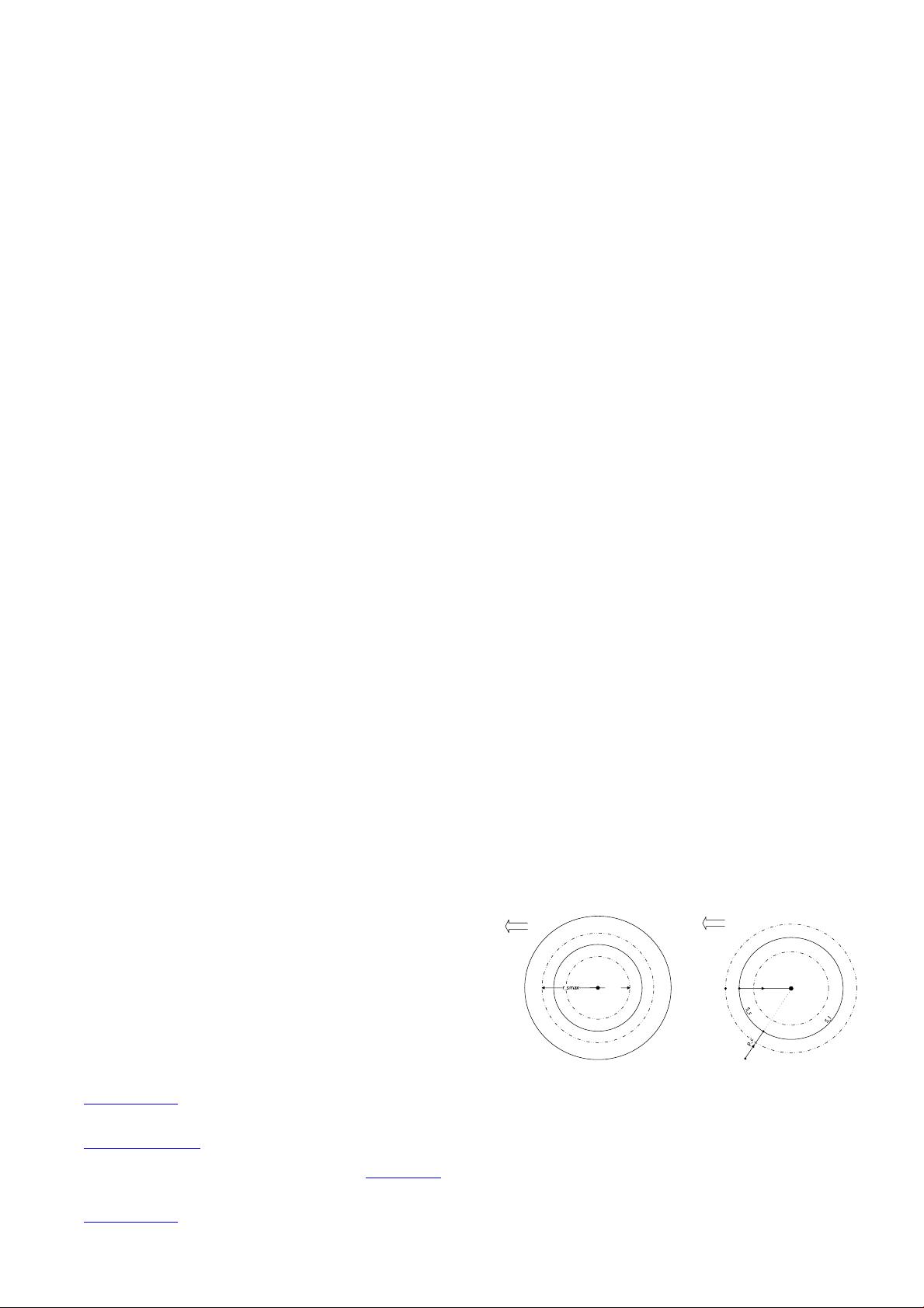
Classic Multi-phase homing principle is shown in Figure
1.
S
Target
r_smin
T
C B A
wind
S
target
wind
S_b
S_e
Figure 1. Classic multi-phase homing principle
In Fig.1, A is the area outside the circle T, B is the area
between the circle S and circle T, C is the area in the circle S,
S_b is the foot point of initial point to S, S_e is the upwind
landing point, S_l is arc between S_b and S_e(the Longer)
and S_sis arc between S_b and S_e(the Shorter).
Multi-phase Homing Optimal Control for Parafoil System
Liying Yang, Xiaoguang Zhao, Feng Gu, Yuqing He
Proceedings of the 2016 IEEE
International Conference on Robotics and Biomimetics
Qingdao, China, December 3-7, 2016
978-1-5090-4363-7/16/$31.00 ©2016 IEEE 1343
下载后可阅读完整内容,剩余5页未读,立即下载
2140 浏览量
2019-10-31 上传
2021-03-28 上传
154 浏览量
108 浏览量
2024-12-22 上传
131 浏览量
120 浏览量
2021-07-08 上传

weixin_38637272
- 粉丝: 4
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- Outsons-crx插件
- Simulink Fixed-Point Tutorial R2006b(日文)演示文件:“SL Fixed-Point Tutorial”演示文件,这是“Fixed-point code generation tutorial using Simulink Fixed-Point / RTW-EC”的示例文件。-matlab开发
- MODS206
- trie-rs:在Rust中实现前缀树的库
- OpenSSL库文件头文件
- monitorapp:外部monitorapp
- SkypeServer-开源
- spring-hibernate:Spring + Hibernate项目
- Controle-e-Telemetria:用于收发器、PS2 控件和遥测的代码和演示
- python中split函数的用法-06-烤地瓜案例步骤分析.ev4.rar
- Bootstarp包和jQuery包,html5shiv和respond包
- Right-Click Search Google Shopping-crx插件
- html-css:知识库html e css
- koki-nakamura22.github.io:我的页面
- python中split函数的用法-05-了解烤地瓜案例需求.ev4.rar
- PIExtraction-:使用流程模型从执行日志中提取准确的性能指标
