MATLAB 2018b Simscape建模:倒立摆仿真教程
"这篇教程介绍了如何使用MATLAB 2018b的Simscape工具对倒立摆进行物理建模和仿真。作者首先讲解了如何进入Simscape仿真环境,然后逐步指导如何构建倒立摆的各个部分,包括小车、摆杆和旋转副的模型。接着,讨论了坐标变换关系的重要性,并提到了蒙版功能的应用。在模型构建完成后,介绍了如何设置关键参数,如PS-Simulink模块的参数。此外,教程还涵盖了控制器的建模,选择了PD控制器来稳定倒立摆。最后,作者简述了仿真过程,并提供了一些参考资料供进一步学习。"
倒立摆的Simscape建模是一个复杂的过程,涉及物理系统的精确模拟。在这个过程中,首先要打开MATLAB并输入`smnew`命令进入Simscape环境。在Library Browser中找到Simscape库,从中选择所需的模块,例如旋转副和滑动副。模型构建时,需要注意坐标系的正确连接,例如小车模型中的B和F坐标模块。摆杆的设置可以通过蒙版功能进行,如设定长度L=0.5,宽度W和高度H均为0.05。尽管滑轨不是必需的,但它可以增加模型的视觉效果。
倒立摆的控制部分,教程中提到采用PD控制器,这是一种常见的反馈控制系统,用于调整系统的输出以减小误差。PD控制器结合了比例(P)和微分(D)项,能有效地稳定动态系统。
在完成模型构建和控制器设计后,通过设置适当的仿真参数,可以运行仿真以观察系统行为。仿真结果能够验证模型的正确性和控制器的效果。为了深入理解倒立摆的仿真,作者提供了多个参考资料,涵盖Simscape的基础知识、PID控制应用以及坐标系和关节的详细解释。
这篇教程是学习如何使用MATLAB 2018b的Simscape工具进行物理系统建模和控制设计的良好起点,特别适合对控制理论和仿真感兴趣的读者。通过这样的实践,学习者可以提升在动态系统分析和控制策略实施方面的能力。
用用MATLAB 2018b的的simscape对倒立摆进行仿真对倒立摆进行仿真
标题标题MATLAB学习笔记(一):倒立摆的学习笔记(一):倒立摆的Simscape建模与仿真建模与仿真
在simscape里对倒立摆进行物理建模
倒立摆的分析和控制器的设计
控制器的建模与仿真
仿真结果
资料与参考
一一.在在simscape里对倒立摆进行物理建模里对倒立摆进行物理建模
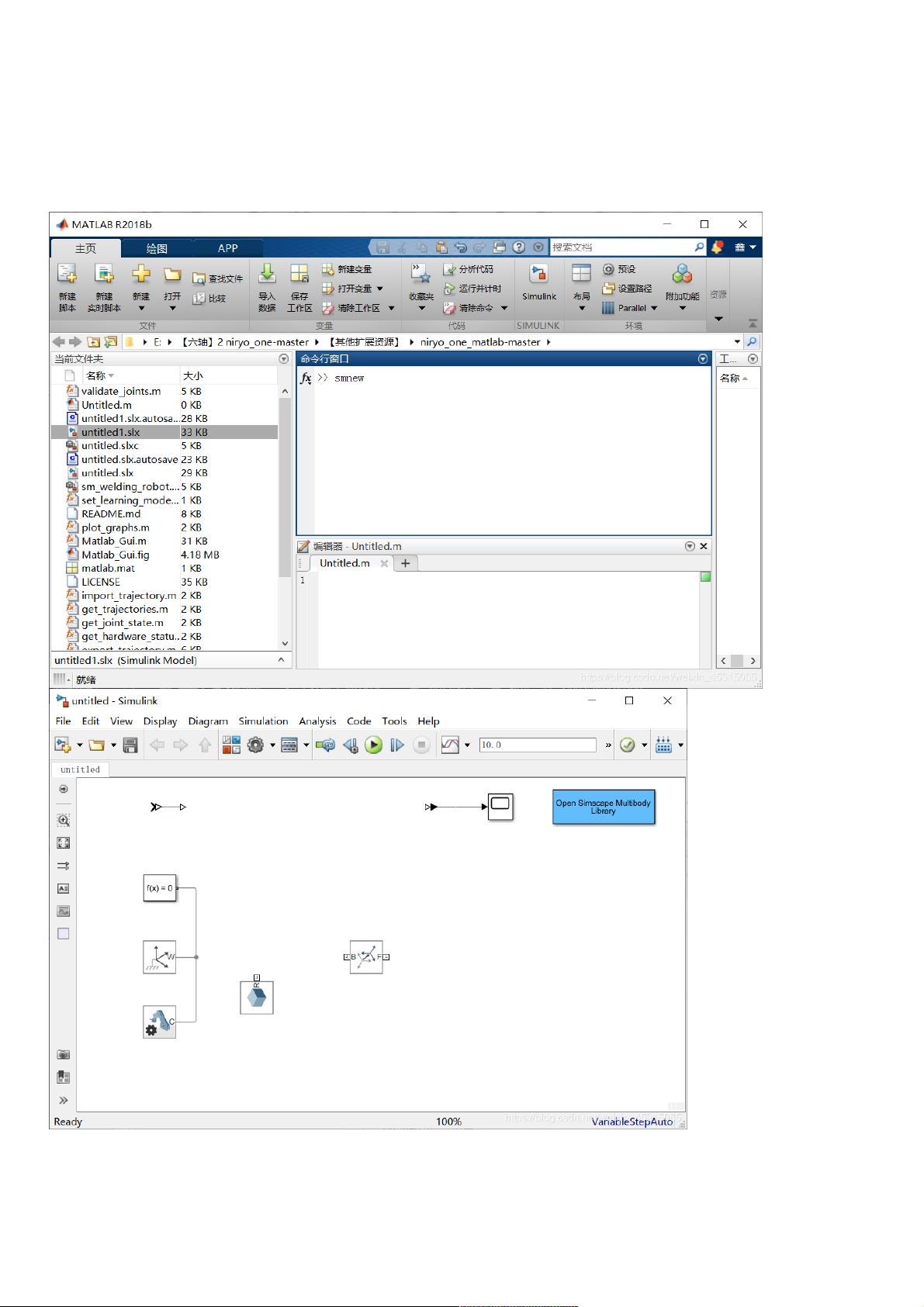
1.打开MATLAB软件,在命令窗口输入smnew进入simscape仿真环境
这个就是simscape的环境了
2.打开library browser,找到里面的simscape
下载后可阅读完整内容,剩余5页未读,立即下载
1055 浏览量
782 浏览量
1433 浏览量
3369 浏览量
2025-02-27 上传
基于MATLAB Simulink R2018b的直流开关电源设计仿真分析与应用实例,基于MATLAB Simulink R2018b的直流开关电源设计仿真研究,直流开关电源设计 的matlab si
2025-02-23 上传
基于MATLAB 2018b及以上的光伏MPPT电导增量法实现及其可改版研究,基于光伏MPPT电导增量法的matlab 2018b及新版改编技术研究,光伏mppt电导增量法,matlab2018b及以
2025-02-16 上传
245 浏览量

weixin_38693586
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 企业网络搭建实践方案:eNSP课程设计深度解析
- 利用Facebook API获取数据并生成PDF月报
- NHS.UK原型套件:创建交互式原型与安全性指南
- 全面的校园网络规划指南及 pkt 工具应用
- Delphi新手入门至高手的精要指南
- IIS部署Asp.Net Core 2.1.1需安装DotNetCore.2.0.8-WindowsHosting
- Suddenlink通信视频策略分析与客户价值提升
- CloudyTabs:轻松管理iCloud标签的菜单栏工具
- 工控机网卡唤醒功能的实用测试工具介绍
- PDFXViwer:高效PDF阅读与注释工具推荐
- MapWinGIS开发实例:图例展示技巧
- npm-audit-reporter-teamcity:实现在TeamCity中自动代码检查
- 安卓端学生管理系统的开发与应用
- Timm图像模型库指南:掌握深度学习图像处理
- 初学者易上手的JSP+Access网上书店教程
- Hive大数据开发工具包apache-hive-2.3.9-bin安装教程
