伺服系统入门教程:理解与调试
下载需积分: 34 | PPT格式 | 1.31MB |
更新于2024-07-28
| 33 浏览量 | 举报
"伺服调试入门课程,旨在帮助学习者理解伺服系统的构成,掌握其基本动作原理和控制特性,包括位置控制、速度控制和力矩控制。课程内容涵盖伺服驱动的基本操作、设定和配线方法,讲解了开环、半闭环和全闭环控制的区别,并介绍了伺服马达和伺服驱动器的工作机制。"
伺服系统是一种精密的运动控制装置,用于精确地定位、速度控制和扭矩控制。在入门阶段,首先要了解的是伺服系统的组成,它通常包括控制器(如NC装置)、驱动器和伺服马达。控制器负责发出指令,驱动器接收并解析这些指令,然后驱动伺服马达进行相应的动作。
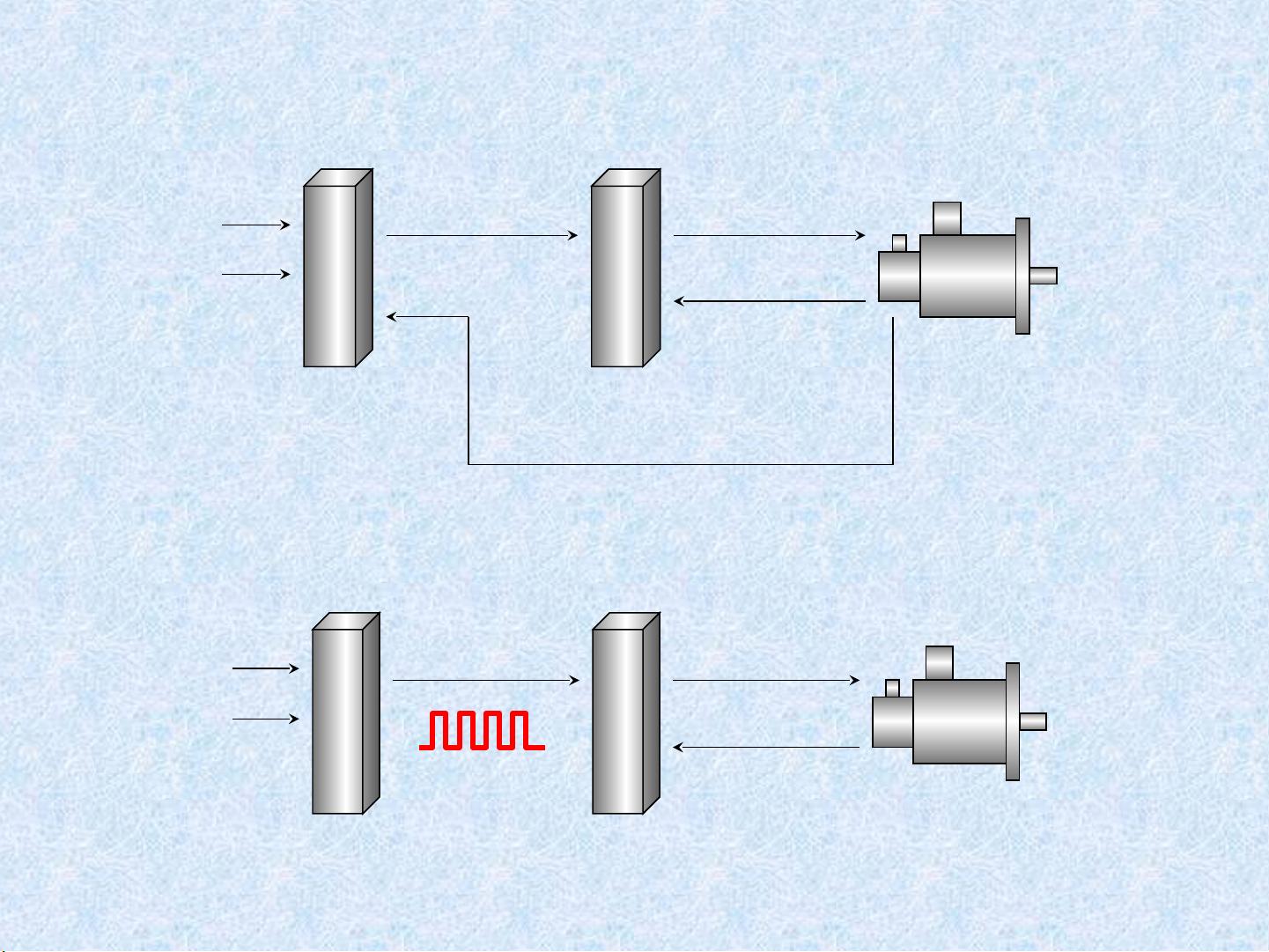
1. **位置控制**:这是通过发送脉冲信号来控制伺服马达的位置。每个脉冲对应一定的角度,例如,一个脉冲可能代表0.36°的角度。控制器(NC装置)发送脉冲数和脉冲频率,以决定马达转动的位置和速度。
2. **开回路控制**:在这种模式下,没有反馈机制,比如使用步进马达,只能单向控制且存在失步可能性,对快速负载变化和速度变化响应不佳。
3. **半闭回路控制**:引入了部分反馈,例如使用编码器,能提供部分位置信息,提高了控制精度,但仍有失步的风险。
4. **全闭合回路控制**:是最精确的控制方式,伺服马达配备高精度编码器或丝性标尺,实时反馈位置、速度和电流信息,实现高精度的控制,减少了失步现象。
5. **伺服马达**:由马达部、旋转编码器和输出轴组成,能够提供精确的位置、速度和扭矩反馈。马达类型有模拟系列和脉冲系列,分别接受模拟电压信号(DC±10V)或脉冲信号作为输入。
6. **伺服驱动器**:处理来自控制器的信号,转化为适合伺服马达的电流,同时处理速度和位置反馈,确保伺服系统的稳定运行。
7. **控制器**:可以是模拟系列或脉冲系列,负责输出位置和速度指令,根据反馈信息调整马达动作,实现精确控制。
在伺服调试过程中,需要熟悉各种控制方式的优缺点,理解不同组件的功能,以及如何正确设置和配置,以达到最佳的伺服系统性能。此外,对于快速负载变化和速度变化的处理,以及伺服驱动器的电流反馈,都是调试过程中的关键考虑因素。
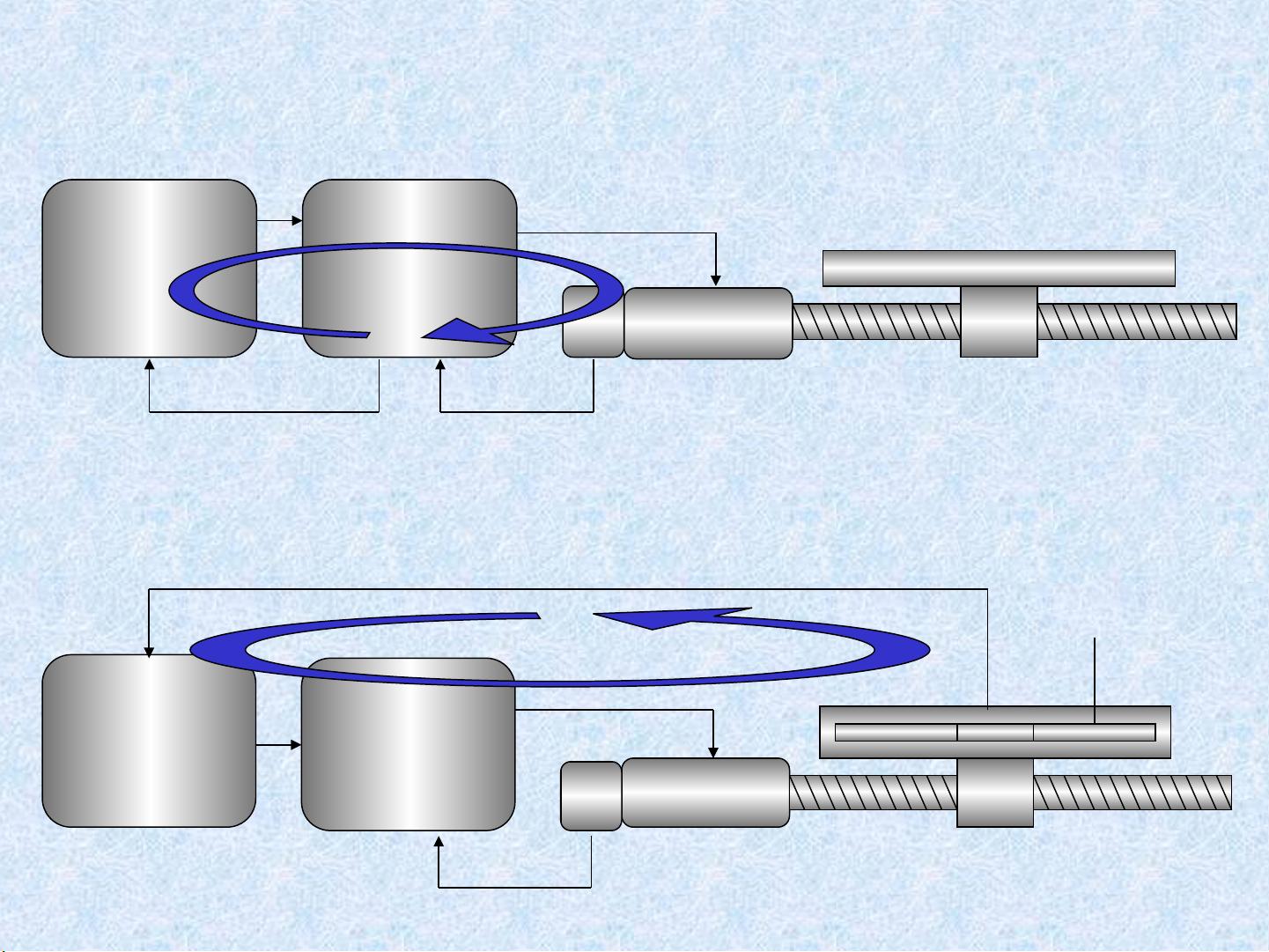
半闭回路
位置控制
控制器
(NC装置)
伺服
驱动器
伺服马达
编码器
全闭合回路
位置控制
控制器
(NC装置)
伺服驱动器
伺服马达
编码器
丝性标尺
剩余54页未读,继续阅读
相关推荐






vv124456
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于HTML构建简易人员管理系统实现增删改查功能
- 360漏洞修复网管版:集中管理与批量更新
- Lokimo-crx: 扩展程序带来房地产市场新视角
- 仁霸门窗设计软件v3.1更新发布,操作更优化
- 探索啤酒API在C#应用开发中的作用
- rcssserver最新版本15.2.2发布
- Redis有序集合(SortedSet)实战演示与代码实践
- CopterControl 3D组件清单压缩文件解读
- Java Swing中JTabbedPane增强功能的实现教程
- 理解CVE的重要性与应用
- VC9运行库:32位与64位系统安装指南
- Android断点续传:Eclipse环境下的下载恢复技术
- 微信小程序地图标注功能:位置信息一目了然
- 平面转三维视效:探索30张立体图片的奇妙
- node-wkhtmltopdf-cli: 构建前端PDF文档的CLI工具
- SpringBoot项目中多数据源与分布式事务整合实践
