Galil伺服电机技术手册:PID补偿与双环控制
需积分: 9 20 浏览量
更新于2024-09-06
收藏 191KB PDF 举报
"Galil_ca伺服电机技术参考pdf,包含了Galil_ca伺服电机的详细技术信息,包括PID控制、双环控制、补偿滤波器等关键功能的描述,旨在帮助用户优化伺服系统的性能。"
在伺服电机控制系统中,Galil_ca的技术参考主要关注了几个核心方面:
1. **PID控制器**:PID(比例-积分-微分)控制器是伺服系统中的基本组成部分。比例(P)项负责即时响应误差,积分(I)项用于消除静态误差,而微分(D)项则有助于减少超调和改善系统的稳定性。参数Ki、Kp和Kd分别对应积分增益、比例增益和微分增益,可以通过调整这些参数来优化伺服电机的响应速度和稳定性。
2. **补偿滤波器**:Galil控制器提供了一个包含PID滤波器、 notch滤波器和低通滤波器的补偿机制。这有助于改善电机的动态性能,消除噪声,并确保系统的快速响应。通过调整滤波器参数,可以针对特定应用需求进行最佳系统调谐。
3. **速度和加速度前馈(FA和FV)**:这些功能允许控制器根据电机的速度和加速度预测未来的误差,从而提前进行补偿,提高系统的响应速度和精度。
4. **双环控制(Dual-loop, DV)**:为减小机械反冲(backlash)的影响,Galil控制器提供了双环控制功能。双环系统通常使用电机上的旋转编码器和负载上的线性编码器。在双环控制中,位置环由负载编码器("PI")关闭,同时从电机编码器中导出阻尼项("D"),这样能提供平滑且精确的控制效果。
5. **其他控制特性**:文档中可能还涵盖了其他控制特性,如电机电流限制(IL)、输出限幅(OUT)、低通滤波器(LOW PASS)和-notch滤波器,它们都有助于改善系统性能,抑制不必要的振荡,确保电机运行平稳。
Galil_ca伺服电机技术参考pdf是一个全面的技术指南,它详细阐述了如何利用Galil控制器的各项高级功能优化伺服系统的性能,对于理解和调试这类伺服电机系统具有很高的价值。通过深入理解并正确设置这些参数,用户能够实现更高效、更精确的伺服电机控制。
Technical Reference
K
i
s
K
p
F
A
FV
S
K
d
•
s
R
OF
TL
PL
NF
IL
OUT
LOW
P
ASS
NOTCH
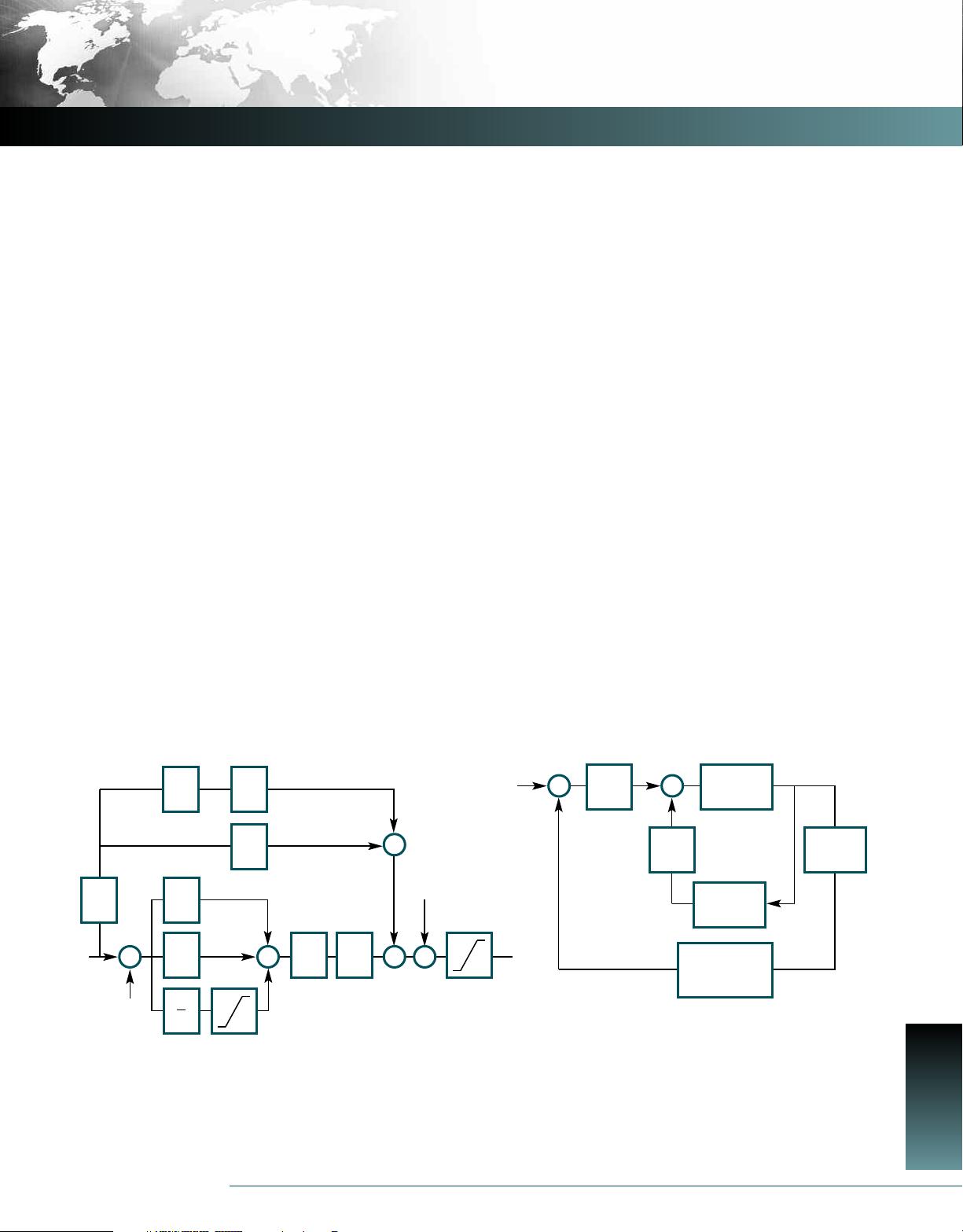
PID Block Diagram
Dual-loop Block Diagram
Σ Σ
Σ
ΣΣ
+
–
S
AMP/MOT
OR
R
∑
∑
+
+
-
-
MOTOR
ENCODER
LOAD ENCODER
D
LOAD
PI
BACKLASH
Servo Motor Compensation Features
Galil motor controllers provide a compensation filter,which includes a
PID (Proportional-Integral-Derivative) filter followed by a notch filter
and a low-pass filter.The compensation also includes velocity and accel-
eration feedforward.All filter parameters are adjustable,allowing servo
system tuning for best performance.Dual loop control is provided for
reducing the effect of backlash.
The dual-loop (DV) feature enables the controller to compensate for
mechanical backlash.Typically,dual-loop systems use a rotary encoder
on the motor and a linear encoder on the load (most Galil controllers
accept inputs from two encoders per axis as a standard feature).Dual-
loop control changes the standard PID control and closes the position
loop with the load encoder (“PI”) and derives the damping terms (“D”)
from the motor encoder.This method provides smooth and accurate
control along the motion path regardless of backlash.
Most Galil motion contr
ollers also include a sinusoidal commutation
feature that allows designers to use lower-cost servo drives.This feature
assures smooth motion and r
educes torque ripple when using brushless
mot
ors.Each axis of sinusoidal commuta
ted motion requires two DAC
outputs that are phase shifted by 120°.The servo amplifier generates
the third commutation signal.The commutation can be initialized with
or without hall sensors.Two controller axes are required for each brush-
less motor.For example,a two-axis controller is required to drive one
brushless motor with sinusoidal c
ommuta
tion.
Command Language
Galil‘s Command Language is comprised of intuitive, two-letter,
English-like ASCII commands that make programming quick and easy.
For example,the “BG”command begins motion while the “SP 2000,
4000”command sets the speed of the X-axis as “2000”and the
Y-axis to “4000”. Commands are included for system set-up,tuning,
prescribing motion,error handling and application programming.
Custom commands can be created upon request.
One of the more powerful features of all Galil controllers is their
ability to store and execute complex application programs designed by
the user.Application programs can be downloaded directly to the con-
troller and executed without host intervention.The main benefit is that
this frees the PC for system-level tasks.In fact,Galil controllers permit
multitasking, which allows up to eight programs to execute simultane-
ously.Also,special commands are available for application programming
including event triggers
,IF/THEN/ELSE statements,conditional jumps,
subroutines,symbolic variables and arrays.
A list of typical DMC c
ommands is shown at the end of this section.
www.galilmc.com / Galil Motion Control,Inc. 1
TECHNICAL REF
General Description
下载后可阅读完整内容,剩余6页未读,立即下载
148 浏览量
206 浏览量
点击了解资源详情
184 浏览量
117 浏览量
2019-10-31 上传
147 浏览量
2019-10-17 上传
2019-10-24 上传

weixin_38743481
- 粉丝: 698
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
